

Artículo del colaborador: David Losada

- Con un LED RGB mostrar la carga/situación de la batería monitorizando una de las celdas (la más débil si es posible) el voltaje de la batería, para evitar sorpresas de no tener carga suficiente para el viaje del día siguiente, indicando en naranja cuando sea necesario recarga (entre el 20 y 40%).
- Con un acelerómetro y un altavoz piezoeléctrico potente (y un mosfet para activarlo) podemos añadir una alarma anti-robo, sólo desarmable por un botón escondido de la vista, lo que es muy práctico contra amigos de lo ajeno.
- E incluso (esto de momento pendiente), añadir luz de freno automática mediante el acelerómetro (que cambie de baja intensidad a intensidad mayor cuando el acelerómetro perciba una deceleración en el eje de la marcha), poder guardar estadísticas de uso (número de recargas, tiempo de uso, o añadir pequeña pantalla OLED para mostrar consumo instantáneo en Ah con un sensor Hall (como el Allegro ACS75x, etc), carga de batería, etc.

Y ésta es la versión actual del programa, con LED y acelerómetro para alarma (también en Github):
/* ==================================================================
Sketch control pensado para un Atmel 328
Activa un LED RGB según el voltaje y tipo batería (Divisor voltaje)
Morado sobrecarga, azul 90-100%, verde 50-90%, amarillo del 30 al 40%,
naranja del 20 al 30%, rojo 10 al 20% y rojo parpadeante por debajo del 10%
Además, cuando está "dormido" vigila si alguien mueve la vici con el GY-521,
haciendo sonar la alarma en ese caso. Y si se olvida encendida y no detecta movimiento
en x minutos, se apaga automáticamente.
Autor: David Losada, basado en trabajos previos de otros autores:
Parte de código de la referencia rápida del Digispark: https://digistump.com/wiki/digispark/quickref
Code for the MPU-6050 Accelerometer + Gyro
By arduino.cc user "Krodal".
July 2013
Open Source / Public Domain
Version: 0.93 bajo licencia GPLv3
Fecha: enero 2017
Includes NeoPixel Ring simple sketch code from (c) 2013 Shae Erisson
released under the GPLv3 license to match the rest of the AdaFruit NeoPixel library
================================================================== */
//#include <EEPROMex.h> //La librería Neopixel ocupa demasiado en el ATtiny; anulo toda la parte de guardado de datos estadísticos
#include <Adafruit_NeoPixel.h> //Para el control del led
//from https://bigdanzblog.wordpress.com/2014/08/10/attiny85-wake-from-sleep-on-pin-state-change-code-example/
#include <avr/sleep.h>
//Librerías para dormir al procesador y ahorrar energía cuando no hace nada
#include <avr/power.h>
#include <avr/wdt.h>
#include <avr/interrupt.h> //creo que al final no se usa, pero mejor dejarla (el compilador no la incluye si no se usa, por lo que no ocupa)
//******************* A CAMBIAR SEGÚN TU CONFIGURACIÓN ********************************
//Relación de voltaje y estado de carga de la batería; se puede agregar para cualquier tipo de batería, siempre teniendo en cuenta que estaremos comprobando sólo una celda de hasta 5V
//por lo que es imprescindible utilizar un BMS de equilibrado de celdas en la carga para evitar problemas con las celdas no monitorizadas
//Descomentamos el tipo de batería que queramos utilizar
//(VALORES %: 1%,8%,20%,30%,40%,90%,100%)
const double mVoltCarga[7] = {2.75, 3.10, 3.17, 3.198, 3.22, 3.4, 3.6}; //tabla de relación de voltajes y carga de LIFEPO (recomendado calibrar (más abajo se indica), por la pequeña diferencia entre estados)
//const double mVoltCarga[7]={3,3.2,3.3,3.6,3.65,4.05,4.2}; //tabla de relación de voltajes y carga de LiCo y LiPo
#define ajusteVolt 0.33 //Voltaje de calibración según el chip y exactitud de resistencias
#define celdas 10 //Cambiar según el número de celdas que tenga tu batería
#define luminLED 140 //De 20 a 255, el valor de luminosidad máxima según el LED (para ahorro de energía y duración del LED recomendado valores <150)
#define minutos 5 //Después de estos minutos, si no hay movimiento, desconectamos electrónica (relé y lámpara)
//He comprobado que si los datos de aceleración en formato crudo (raw) superan los valores anteriores en 500, alquien lo está manipulando
#define sensibilidadAccel 500 //Pero podéis poner el valor que estiméis según la sensibilidad de vuestro equipo
#define resetAlarmaSeg 30 //Tiempo en segundos para anular alarma si no hay movimiento
#define tiempoEspera 20 //Tiempo en segundos de espera desde que dejamos apagada la bici hasta que se activa alarma antirrobo.
//Definición pines analógicos monitorización batería
//En el ATTiny85 las entradas son (1)=P2; (2)=P4; (3)=P3; (0)=P5 y pines PWM P0, P1 y P4
#define relePIN 3 //Conectar la batería y luces; desconectar cuando la batería baje de 2,8V
#define intPIN 2 //PB2 is INT0 pin; Pin de interruptor para encender Y apagar bici (activar relé), *** HAY QUE CONECTARLO A GND (Tierra) para activarlo
#define ledPIN 13 //Pin del LED incorporado, para hacerlo parpadear, en el ATTiny85 B es el 1
#define zumbPIN 7 //Para activar zumbador intermitentemente cuando la batería baje del 5%
#define voltajePIN 2 //Entrada de voltaje con divisor de voltaje
//Definición LED RGB Neopixel PL-9823-F5/F8 https://surrealitylabs.com/2014/08/playing-with-the-pl9823-f5-a-breadboardable-neopixel-compatible-led/
// Which pin on the Arduino is connected to the NeoPixels?
#define PIN 4 //Salida que usamos para la comunicación digital con el LED RGB
// Número de Neopixels conectados al Arduino
#define NUMPIXELS 1
//***********FIN CONFIGURACIÓN PERSONALIZADA***************************************
//unsigned long millisInicio=0; //Para comprobar paso de horas
//unsigned long millisVoltaje=0; //Segunda comprobación voltaje
boolean parpadea = false; //Para parpadear rojo
boolean encendido = true; //Controlamos si está desconectada la bici
boolean movimiento = false; //Para comprobar si está usándose
byte contAlarma=resetAlarmaSeg; //Cuando pasen estos segundos desde el último movimiento, ponemos contador a 0, para resetear si se ha movido por error puntualmente
double voltaje[3] = {0, 0, 0}; //Valores obtenidos muestras
double value = 0; //Voltaje obtenido para una celda
unsigned long contador = 0; //Para comprobar el tiempo según el número de veces que se ejecute
//unsigned long timeLED=0; //Almacenar tiempo transcurrido
byte color = 0; //Para guardar el color anterior
// When we setup the NeoPixel library, we tell it how many pixels, and which pin to use to send signals.
// Note that for older NeoPixel strips you might need to change the third parameter--see the strandtest
// example for more information on possible values.
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// **** SIGUIENTE PARTE DEFINICIONES Y CONFIG DEL MPU-6050
// Documentation MPU-6050:
// - The InvenSense documents:
// - "MPU-6000 and MPU-6050 Product Specification",
// PS-MPU-6000A.pdf
// - "MPU-6000 and MPU-6050 Register Map and Descriptions",
// RM-MPU-6000A.pdf or RS-MPU-6000A.pdf
// - "MPU-6000/MPU-6050 9-Axis Evaluation Board User Guide"
// AN-MPU-6000EVB.pdf
//
// The accuracy is 16-bits.
//
// Temperature sensor from -40 to +85 degrees Celsius
// 340 per degrees, -512 at 35 degrees.
//
// At power-up, all registers are zero, except these two:
// Register 0x6B (PWR_MGMT_2) = 0x40 (I read zero).
// Register 0x75 (WHO_AM_I) = 0x68.
//
#include <Wire.h>
long accelX = 0; //Para comparar los datos raw con los anteriores
long accelY = 0;
long accelZ = 0;
long accelXAnt = 0;
long accelYAnt = 0;
long accelZAnt = 0;
int alarmaAct = 0; //Contador de movimientos detectados
byte esperaAlarma = tiempoEspera; //Espera x segundos desde que se apaga sin movimiento a activar la alarma
//byte bateriaCriticaSeg=tiempoCritica; //Tiempo de espera con batería baja antes de apagar todo
// The name of the sensor is "MPU-6050".
// For program code, I omit the '-',
// therefor I use the name "MPU6050....".
// Register names according to the datasheet.
// According to the InvenSense document
// "MPU-6000 and MPU-6050 Register Map
// and Descriptions Revision 3.2", there are no registers
// at 0x02 ... 0x18, but according other information
// the registers in that unknown area are for gain
// and offsets.
//
#define MPU6050_AUX_VDDIO 0x01 // R/W
#define MPU6050_SMPLRT_DIV 0x19 // R/W
#define MPU6050_CONFIG 0x1A // R/W
#define MPU6050_GYRO_CONFIG 0x1B // R/W
#define MPU6050_ACCEL_CONFIG 0x1C // R/W
#define MPU6050_FF_THR 0x1D // R/W
#define MPU6050_FF_DUR 0x1E // R/W
#define MPU6050_MOT_THR 0x1F // R/W
#define MPU6050_MOT_DUR 0x20 // R/W
#define MPU6050_ZRMOT_THR 0x21 // R/W
#define MPU6050_ZRMOT_DUR 0x22 // R/W
#define MPU6050_FIFO_EN 0x23 // R/W
#define MPU6050_I2C_MST_CTRL 0x24 // R/W
#define MPU6050_I2C_SLV0_ADDR 0x25 // R/W
#define MPU6050_I2C_SLV0_REG 0x26 // R/W
#define MPU6050_I2C_SLV0_CTRL 0x27 // R/W
#define MPU6050_I2C_SLV1_ADDR 0x28 // R/W
#define MPU6050_I2C_SLV1_REG 0x29 // R/W
#define MPU6050_I2C_SLV1_CTRL 0x2A // R/W
#define MPU6050_I2C_SLV2_ADDR 0x2B // R/W
#define MPU6050_I2C_SLV2_REG 0x2C // R/W
#define MPU6050_I2C_SLV2_CTRL 0x2D // R/W
#define MPU6050_I2C_SLV3_ADDR 0x2E // R/W
#define MPU6050_I2C_SLV3_REG 0x2F // R/W
#define MPU6050_I2C_SLV3_CTRL 0x30 // R/W
#define MPU6050_I2C_SLV4_ADDR 0x31 // R/W
#define MPU6050_I2C_SLV4_REG 0x32 // R/W
#define MPU6050_I2C_SLV4_DO 0x33 // R/W
#define MPU6050_I2C_SLV4_CTRL 0x34 // R/W
#define MPU6050_I2C_SLV4_DI 0x35 // R
#define MPU6050_I2C_MST_STATUS 0x36 // R
#define MPU6050_INT_PIN_CFG 0x37 // R/W
#define MPU6050_INT_ENABLE 0x38 // R/W
#define MPU6050_INT_STATUS 0x3A // R
#define MPU6050_ACCEL_XOUT_H 0x3B // R
#define MPU6050_ACCEL_XOUT_L 0x3C // R
#define MPU6050_ACCEL_YOUT_H 0x3D // R
#define MPU6050_ACCEL_YOUT_L 0x3E // R
#define MPU6050_ACCEL_ZOUT_H 0x3F // R
#define MPU6050_ACCEL_ZOUT_L 0x40 // R
#define MPU6050_TEMP_OUT_H 0x41 // R
#define MPU6050_TEMP_OUT_L 0x42 // R
#define MPU6050_GYRO_XOUT_H 0x43 // R
#define MPU6050_GYRO_XOUT_L 0x44 // R
#define MPU6050_GYRO_YOUT_H 0x45 // R
#define MPU6050_GYRO_YOUT_L 0x46 // R
#define MPU6050_GYRO_ZOUT_H 0x47 // R
#define MPU6050_GYRO_ZOUT_L 0x48 // R
#define MPU6050_EXT_SENS_DATA_00 0x49 // R
#define MPU6050_EXT_SENS_DATA_01 0x4A // R
#define MPU6050_EXT_SENS_DATA_02 0x4B // R
#define MPU6050_EXT_SENS_DATA_03 0x4C // R
#define MPU6050_EXT_SENS_DATA_04 0x4D // R
#define MPU6050_EXT_SENS_DATA_05 0x4E // R
#define MPU6050_EXT_SENS_DATA_06 0x4F // R
#define MPU6050_EXT_SENS_DATA_07 0x50 // R
#define MPU6050_EXT_SENS_DATA_08 0x51 // R
#define MPU6050_EXT_SENS_DATA_09 0x52 // R
#define MPU6050_EXT_SENS_DATA_10 0x53 // R
#define MPU6050_EXT_SENS_DATA_11 0x54 // R
#define MPU6050_EXT_SENS_DATA_12 0x55 // R
#define MPU6050_EXT_SENS_DATA_13 0x56 // R
#define MPU6050_EXT_SENS_DATA_14 0x57 // R
#define MPU6050_EXT_SENS_DATA_15 0x58 // R
#define MPU6050_EXT_SENS_DATA_16 0x59 // R
#define MPU6050_EXT_SENS_DATA_17 0x5A // R
#define MPU6050_EXT_SENS_DATA_18 0x5B // R
#define MPU6050_EXT_SENS_DATA_19 0x5C // R
#define MPU6050_EXT_SENS_DATA_20 0x5D // R
#define MPU6050_EXT_SENS_DATA_21 0x5E // R
#define MPU6050_EXT_SENS_DATA_22 0x5F // R
#define MPU6050_EXT_SENS_DATA_23 0x60 // R
#define MPU6050_MOT_DETECT_STATUS 0x61 // R
#define MPU6050_I2C_SLV0_DO 0x63 // R/W
#define MPU6050_I2C_SLV1_DO 0x64 // R/W
#define MPU6050_I2C_SLV2_DO 0x65 // R/W
#define MPU6050_I2C_SLV3_DO 0x66 // R/W
#define MPU6050_I2C_MST_DELAY_CTRL 0x67 // R/W
#define MPU6050_SIGNAL_PATH_RESET 0x68 // R/W
#define MPU6050_MOT_DETECT_CTRL 0x69 // R/W
#define MPU6050_USER_CTRL 0x6A // R/W
#define MPU6050_PWR_MGMT_1 0x6B // R/W
#define MPU6050_PWR_MGMT_2 0x6C // R/W
#define MPU6050_FIFO_COUNTH 0x72 // R/W
#define MPU6050_FIFO_COUNTL 0x73 // R/W
#define MPU6050_FIFO_R_W 0x74 // R/W
#define MPU6050_WHO_AM_I 0x75 // R
// Defines for the bits, to be able to change
// between bit number and binary definition.
// By using the bit number, programming the sensor
// is like programming the AVR microcontroller.
// But instead of using "(1<<X)", or "_BV(X)",
// the Arduino "bit(X)" is used.
#define MPU6050_D0 0
#define MPU6050_D1 1
#define MPU6050_D2 2
#define MPU6050_D3 3
#define MPU6050_D4 4
#define MPU6050_D5 5
#define MPU6050_D6 6
#define MPU6050_D7 7
// AUX_VDDIO Register
#define MPU6050_AUX_VDDIO MPU6050_D7 // I2C high: 1=VDD, 0=VLOGIC
// CONFIG Register
// DLPF is Digital Low Pass Filter for both gyro and accelerometers.
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_DLPF_CFG0 MPU6050_D0
#define MPU6050_DLPF_CFG1 MPU6050_D1
#define MPU6050_DLPF_CFG2 MPU6050_D2
#define MPU6050_EXT_SYNC_SET0 MPU6050_D3
#define MPU6050_EXT_SYNC_SET1 MPU6050_D4
#define MPU6050_EXT_SYNC_SET2 MPU6050_D5
// Combined definitions for the EXT_SYNC_SET values
#define MPU6050_EXT_SYNC_SET_0 (0)
#define MPU6050_EXT_SYNC_SET_1 (bit(MPU6050_EXT_SYNC_SET0))
#define MPU6050_EXT_SYNC_SET_2 (bit(MPU6050_EXT_SYNC_SET1))
#define MPU6050_EXT_SYNC_SET_3 (bit(MPU6050_EXT_SYNC_SET1)|bit(MPU6050_EXT_SYNC_SET0))
#define MPU6050_EXT_SYNC_SET_4 (bit(MPU6050_EXT_SYNC_SET2))
#define MPU6050_EXT_SYNC_SET_5 (bit(MPU6050_EXT_SYNC_SET2)|bit(MPU6050_EXT_SYNC_SET0))
#define MPU6050_EXT_SYNC_SET_6 (bit(MPU6050_EXT_SYNC_SET2)|bit(MPU6050_EXT_SYNC_SET1))
#define MPU6050_EXT_SYNC_SET_7 (bit(MPU6050_EXT_SYNC_SET2)|bit(MPU6050_EXT_SYNC_SET1)|bit(MPU6050_EXT_SYNC_SET0))
// Alternative names for the combined definitions.
#define MPU6050_EXT_SYNC_DISABLED MPU6050_EXT_SYNC_SET_0
#define MPU6050_EXT_SYNC_TEMP_OUT_L MPU6050_EXT_SYNC_SET_1
#define MPU6050_EXT_SYNC_GYRO_XOUT_L MPU6050_EXT_SYNC_SET_2
#define MPU6050_EXT_SYNC_GYRO_YOUT_L MPU6050_EXT_SYNC_SET_3
#define MPU6050_EXT_SYNC_GYRO_ZOUT_L MPU6050_EXT_SYNC_SET_4
#define MPU6050_EXT_SYNC_ACCEL_XOUT_L MPU6050_EXT_SYNC_SET_5
#define MPU6050_EXT_SYNC_ACCEL_YOUT_L MPU6050_EXT_SYNC_SET_6
#define MPU6050_EXT_SYNC_ACCEL_ZOUT_L MPU6050_EXT_SYNC_SET_7
// Combined definitions for the DLPF_CFG values
#define MPU6050_DLPF_CFG_0 (0)
#define MPU6050_DLPF_CFG_1 (bit(MPU6050_DLPF_CFG0))
#define MPU6050_DLPF_CFG_2 (bit(MPU6050_DLPF_CFG1))
#define MPU6050_DLPF_CFG_3 (bit(MPU6050_DLPF_CFG1)|bit(MPU6050_DLPF_CFG0))
#define MPU6050_DLPF_CFG_4 (bit(MPU6050_DLPF_CFG2))
#define MPU6050_DLPF_CFG_5 (bit(MPU6050_DLPF_CFG2)|bit(MPU6050_DLPF_CFG0))
#define MPU6050_DLPF_CFG_6 (bit(MPU6050_DLPF_CFG2)|bit(MPU6050_DLPF_CFG1))
#define MPU6050_DLPF_CFG_7 (bit(MPU6050_DLPF_CFG2)|bit(MPU6050_DLPF_CFG1)|bit(MPU6050_DLPF_CFG0))
// Alternative names for the combined definitions
// This name uses the bandwidth (Hz) for the accelometer,
// for the gyro the bandwidth is almost the same.
#define MPU6050_DLPF_260HZ MPU6050_DLPF_CFG_0
#define MPU6050_DLPF_184HZ MPU6050_DLPF_CFG_1
#define MPU6050_DLPF_94HZ MPU6050_DLPF_CFG_2
#define MPU6050_DLPF_44HZ MPU6050_DLPF_CFG_3
#define MPU6050_DLPF_21HZ MPU6050_DLPF_CFG_4
#define MPU6050_DLPF_10HZ MPU6050_DLPF_CFG_5
#define MPU6050_DLPF_5HZ MPU6050_DLPF_CFG_6
#define MPU6050_DLPF_RESERVED MPU6050_DLPF_CFG_7
// GYRO_CONFIG Register
// The XG_ST, YG_ST, ZG_ST are bits for selftest.
// The FS_SEL sets the range for the gyro.
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_FS_SEL0 MPU6050_D3
#define MPU6050_FS_SEL1 MPU6050_D4
#define MPU6050_ZG_ST MPU6050_D5
#define MPU6050_YG_ST MPU6050_D6
#define MPU6050_XG_ST MPU6050_D7
// Combined definitions for the FS_SEL values
#define MPU6050_FS_SEL_0 (0)
#define MPU6050_FS_SEL_1 (bit(MPU6050_FS_SEL0))
#define MPU6050_FS_SEL_2 (bit(MPU6050_FS_SEL1))
#define MPU6050_FS_SEL_3 (bit(MPU6050_FS_SEL1)|bit(MPU6050_FS_SEL0))
// Alternative names for the combined definitions
// The name uses the range in degrees per second.
#define MPU6050_FS_SEL_250 MPU6050_FS_SEL_0
#define MPU6050_FS_SEL_500 MPU6050_FS_SEL_1
#define MPU6050_FS_SEL_1000 MPU6050_FS_SEL_2
#define MPU6050_FS_SEL_2000 MPU6050_FS_SEL_3
// ACCEL_CONFIG Register
// The XA_ST, YA_ST, ZA_ST are bits for selftest.
// The AFS_SEL sets the range for the accelerometer.
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_ACCEL_HPF0 MPU6050_D0
#define MPU6050_ACCEL_HPF1 MPU6050_D1
#define MPU6050_ACCEL_HPF2 MPU6050_D2
#define MPU6050_AFS_SEL0 MPU6050_D3
#define MPU6050_AFS_SEL1 MPU6050_D4
#define MPU6050_ZA_ST MPU6050_D5
#define MPU6050_YA_ST MPU6050_D6
#define MPU6050_XA_ST MPU6050_D7
// Combined definitions for the ACCEL_HPF values
#define MPU6050_ACCEL_HPF_0 (0)
#define MPU6050_ACCEL_HPF_1 (bit(MPU6050_ACCEL_HPF0))
#define MPU6050_ACCEL_HPF_2 (bit(MPU6050_ACCEL_HPF1))
#define MPU6050_ACCEL_HPF_3 (bit(MPU6050_ACCEL_HPF1)|bit(MPU6050_ACCEL_HPF0))
#define MPU6050_ACCEL_HPF_4 (bit(MPU6050_ACCEL_HPF2))
#define MPU6050_ACCEL_HPF_7 (bit(MPU6050_ACCEL_HPF2)|bit(MPU6050_ACCEL_HPF1)|bit(MPU6050_ACCEL_HPF0))
// Alternative names for the combined definitions
// The name uses the Cut-off frequency.
#define MPU6050_ACCEL_HPF_RESET MPU6050_ACCEL_HPF_0
#define MPU6050_ACCEL_HPF_5HZ MPU6050_ACCEL_HPF_1
#define MPU6050_ACCEL_HPF_2_5HZ MPU6050_ACCEL_HPF_2
#define MPU6050_ACCEL_HPF_1_25HZ MPU6050_ACCEL_HPF_3
#define MPU6050_ACCEL_HPF_0_63HZ MPU6050_ACCEL_HPF_4
#define MPU6050_ACCEL_HPF_HOLD MPU6050_ACCEL_HPF_7
// Combined definitions for the AFS_SEL values
#define MPU6050_AFS_SEL_0 (0)
#define MPU6050_AFS_SEL_1 (bit(MPU6050_AFS_SEL0))
#define MPU6050_AFS_SEL_2 (bit(MPU6050_AFS_SEL1))
#define MPU6050_AFS_SEL_3 (bit(MPU6050_AFS_SEL1)|bit(MPU6050_AFS_SEL0))
// Alternative names for the combined definitions
// The name uses the full scale range for the accelerometer.
#define MPU6050_AFS_SEL_2G MPU6050_AFS_SEL_0
#define MPU6050_AFS_SEL_4G MPU6050_AFS_SEL_1
#define MPU6050_AFS_SEL_8G MPU6050_AFS_SEL_2
#define MPU6050_AFS_SEL_16G MPU6050_AFS_SEL_3
// FIFO_EN Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_SLV0_FIFO_EN MPU6050_D0
#define MPU6050_SLV1_FIFO_EN MPU6050_D1
#define MPU6050_SLV2_FIFO_EN MPU6050_D2
#define MPU6050_ACCEL_FIFO_EN MPU6050_D3
#define MPU6050_ZG_FIFO_EN MPU6050_D4
#define MPU6050_YG_FIFO_EN MPU6050_D5
#define MPU6050_XG_FIFO_EN MPU6050_D6
#define MPU6050_TEMP_FIFO_EN MPU6050_D7
// I2C_MST_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_MST_CLK0 MPU6050_D0
#define MPU6050_I2C_MST_CLK1 MPU6050_D1
#define MPU6050_I2C_MST_CLK2 MPU6050_D2
#define MPU6050_I2C_MST_CLK3 MPU6050_D3
#define MPU6050_I2C_MST_P_NSR MPU6050_D4
#define MPU6050_SLV_3_FIFO_EN MPU6050_D5
#define MPU6050_WAIT_FOR_ES MPU6050_D6
#define MPU6050_MULT_MST_EN MPU6050_D7
// Combined definitions for the I2C_MST_CLK
#define MPU6050_I2C_MST_CLK_0 (0)
#define MPU6050_I2C_MST_CLK_1 (bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_2 (bit(MPU6050_I2C_MST_CLK1))
#define MPU6050_I2C_MST_CLK_3 (bit(MPU6050_I2C_MST_CLK1)|bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_4 (bit(MPU6050_I2C_MST_CLK2))
#define MPU6050_I2C_MST_CLK_5 (bit(MPU6050_I2C_MST_CLK2)|bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_6 (bit(MPU6050_I2C_MST_CLK2)|bit(MPU6050_I2C_MST_CLK1))
#define MPU6050_I2C_MST_CLK_7 (bit(MPU6050_I2C_MST_CLK2)|bit(MPU6050_I2C_MST_CLK1)|bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_8 (bit(MPU6050_I2C_MST_CLK3))
#define MPU6050_I2C_MST_CLK_9 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_10 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK1))
#define MPU6050_I2C_MST_CLK_11 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK1)|bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_12 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK2))
#define MPU6050_I2C_MST_CLK_13 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK2)|bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_14 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK2)|bit(MPU6050_I2C_MST_CLK1))
#define MPU6050_I2C_MST_CLK_15 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK2)|bit(MPU6050_I2C_MST_CLK1)|bit(MPU6050_I2C_MST_CLK0))
// Alternative names for the combined definitions
// The names uses I2C Master Clock Speed in kHz.
#define MPU6050_I2C_MST_CLK_348KHZ MPU6050_I2C_MST_CLK_0
#define MPU6050_I2C_MST_CLK_333KHZ MPU6050_I2C_MST_CLK_1
#define MPU6050_I2C_MST_CLK_320KHZ MPU6050_I2C_MST_CLK_2
#define MPU6050_I2C_MST_CLK_308KHZ MPU6050_I2C_MST_CLK_3
#define MPU6050_I2C_MST_CLK_296KHZ MPU6050_I2C_MST_CLK_4
#define MPU6050_I2C_MST_CLK_286KHZ MPU6050_I2C_MST_CLK_5
#define MPU6050_I2C_MST_CLK_276KHZ MPU6050_I2C_MST_CLK_6
#define MPU6050_I2C_MST_CLK_267KHZ MPU6050_I2C_MST_CLK_7
#define MPU6050_I2C_MST_CLK_258KHZ MPU6050_I2C_MST_CLK_8
#define MPU6050_I2C_MST_CLK_500KHZ MPU6050_I2C_MST_CLK_9
#define MPU6050_I2C_MST_CLK_471KHZ MPU6050_I2C_MST_CLK_10
#define MPU6050_I2C_MST_CLK_444KHZ MPU6050_I2C_MST_CLK_11
#define MPU6050_I2C_MST_CLK_421KHZ MPU6050_I2C_MST_CLK_12
#define MPU6050_I2C_MST_CLK_400KHZ MPU6050_I2C_MST_CLK_13
#define MPU6050_I2C_MST_CLK_381KHZ MPU6050_I2C_MST_CLK_14
#define MPU6050_I2C_MST_CLK_364KHZ MPU6050_I2C_MST_CLK_15
// I2C_SLV0_ADDR Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV0_RW MPU6050_D7
// I2C_SLV0_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV0_LEN0 MPU6050_D0
#define MPU6050_I2C_SLV0_LEN1 MPU6050_D1
#define MPU6050_I2C_SLV0_LEN2 MPU6050_D2
#define MPU6050_I2C_SLV0_LEN3 MPU6050_D3
#define MPU6050_I2C_SLV0_GRP MPU6050_D4
#define MPU6050_I2C_SLV0_REG_DIS MPU6050_D5
#define MPU6050_I2C_SLV0_BYTE_SW MPU6050_D6
#define MPU6050_I2C_SLV0_EN MPU6050_D7
// A mask for the length
#define MPU6050_I2C_SLV0_LEN_MASK 0x0F
// I2C_SLV1_ADDR Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV1_RW MPU6050_D7
// I2C_SLV1_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV1_LEN0 MPU6050_D0
#define MPU6050_I2C_SLV1_LEN1 MPU6050_D1
#define MPU6050_I2C_SLV1_LEN2 MPU6050_D2
#define MPU6050_I2C_SLV1_LEN3 MPU6050_D3
#define MPU6050_I2C_SLV1_GRP MPU6050_D4
#define MPU6050_I2C_SLV1_REG_DIS MPU6050_D5
#define MPU6050_I2C_SLV1_BYTE_SW MPU6050_D6
#define MPU6050_I2C_SLV1_EN MPU6050_D7
// A mask for the length
#define MPU6050_I2C_SLV1_LEN_MASK 0x0F
// I2C_SLV2_ADDR Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV2_RW MPU6050_D7
// I2C_SLV2_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV2_LEN0 MPU6050_D0
#define MPU6050_I2C_SLV2_LEN1 MPU6050_D1
#define MPU6050_I2C_SLV2_LEN2 MPU6050_D2
#define MPU6050_I2C_SLV2_LEN3 MPU6050_D3
#define MPU6050_I2C_SLV2_GRP MPU6050_D4
#define MPU6050_I2C_SLV2_REG_DIS MPU6050_D5
#define MPU6050_I2C_SLV2_BYTE_SW MPU6050_D6
#define MPU6050_I2C_SLV2_EN MPU6050_D7
// A mask for the length
#define MPU6050_I2C_SLV2_LEN_MASK 0x0F
// I2C_SLV3_ADDR Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV3_RW MPU6050_D7
// I2C_SLV3_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV3_LEN0 MPU6050_D0
#define MPU6050_I2C_SLV3_LEN1 MPU6050_D1
#define MPU6050_I2C_SLV3_LEN2 MPU6050_D2
#define MPU6050_I2C_SLV3_LEN3 MPU6050_D3
#define MPU6050_I2C_SLV3_GRP MPU6050_D4
#define MPU6050_I2C_SLV3_REG_DIS MPU6050_D5
#define MPU6050_I2C_SLV3_BYTE_SW MPU6050_D6
#define MPU6050_I2C_SLV3_EN MPU6050_D7
// A mask for the length
#define MPU6050_I2C_SLV3_LEN_MASK 0x0F
// I2C_SLV4_ADDR Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV4_RW MPU6050_D7
// I2C_SLV4_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_MST_DLY0 MPU6050_D0
#define MPU6050_I2C_MST_DLY1 MPU6050_D1
#define MPU6050_I2C_MST_DLY2 MPU6050_D2
#define MPU6050_I2C_MST_DLY3 MPU6050_D3
#define MPU6050_I2C_MST_DLY4 MPU6050_D4
#define MPU6050_I2C_SLV4_REG_DIS MPU6050_D5
#define MPU6050_I2C_SLV4_INT_EN MPU6050_D6
#define MPU6050_I2C_SLV4_EN MPU6050_D7
// A mask for the delay
#define MPU6050_I2C_MST_DLY_MASK 0x1F
// I2C_MST_STATUS Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV0_NACK MPU6050_D0
#define MPU6050_I2C_SLV1_NACK MPU6050_D1
#define MPU6050_I2C_SLV2_NACK MPU6050_D2
#define MPU6050_I2C_SLV3_NACK MPU6050_D3
#define MPU6050_I2C_SLV4_NACK MPU6050_D4
#define MPU6050_I2C_LOST_ARB MPU6050_D5
#define MPU6050_I2C_SLV4_DONE MPU6050_D6
#define MPU6050_PASS_THROUGH MPU6050_D7
// I2C_PIN_CFG Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_CLKOUT_EN MPU6050_D0
#define MPU6050_I2C_BYPASS_EN MPU6050_D1
#define MPU6050_FSYNC_INT_EN MPU6050_D2
#define MPU6050_FSYNC_INT_LEVEL MPU6050_D3
#define MPU6050_INT_RD_CLEAR MPU6050_D4
#define MPU6050_LATCH_INT_EN MPU6050_D5
#define MPU6050_INT_OPEN MPU6050_D6
#define MPU6050_INT_LEVEL MPU6050_D7
// INT_ENABLE Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_DATA_RDY_EN MPU6050_D0
#define MPU6050_I2C_MST_INT_EN MPU6050_D3
#define MPU6050_FIFO_OFLOW_EN MPU6050_D4
#define MPU6050_ZMOT_EN MPU6050_D5
#define MPU6050_MOT_EN MPU6050_D6
#define MPU6050_FF_EN MPU6050_D7
// INT_STATUS Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_DATA_RDY_INT MPU6050_D0
#define MPU6050_I2C_MST_INT MPU6050_D3
#define MPU6050_FIFO_OFLOW_INT MPU6050_D4
#define MPU6050_ZMOT_INT MPU6050_D5
#define MPU6050_MOT_INT MPU6050_D6
#define MPU6050_FF_INT MPU6050_D7
// MOT_DETECT_STATUS Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_MOT_ZRMOT MPU6050_D0
#define MPU6050_MOT_ZPOS MPU6050_D2
#define MPU6050_MOT_ZNEG MPU6050_D3
#define MPU6050_MOT_YPOS MPU6050_D4
#define MPU6050_MOT_YNEG MPU6050_D5
#define MPU6050_MOT_XPOS MPU6050_D6
#define MPU6050_MOT_XNEG MPU6050_D7
// IC2_MST_DELAY_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV0_DLY_EN MPU6050_D0
#define MPU6050_I2C_SLV1_DLY_EN MPU6050_D1
#define MPU6050_I2C_SLV2_DLY_EN MPU6050_D2
#define MPU6050_I2C_SLV3_DLY_EN MPU6050_D3
#define MPU6050_I2C_SLV4_DLY_EN MPU6050_D4
#define MPU6050_DELAY_ES_SHADOW MPU6050_D7
// SIGNAL_PATH_RESET Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_TEMP_RESET MPU6050_D0
#define MPU6050_ACCEL_RESET MPU6050_D1
#define MPU6050_GYRO_RESET MPU6050_D2
// MOT_DETECT_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_MOT_COUNT0 MPU6050_D0
#define MPU6050_MOT_COUNT1 MPU6050_D1
#define MPU6050_FF_COUNT0 MPU6050_D2
#define MPU6050_FF_COUNT1 MPU6050_D3
#define MPU6050_ACCEL_ON_DELAY0 MPU6050_D4
#define MPU6050_ACCEL_ON_DELAY1 MPU6050_D5
// Combined definitions for the MOT_COUNT
#define MPU6050_MOT_COUNT_0 (0)
#define MPU6050_MOT_COUNT_1 (bit(MPU6050_MOT_COUNT0))
#define MPU6050_MOT_COUNT_2 (bit(MPU6050_MOT_COUNT1))
#define MPU6050_MOT_COUNT_3 (bit(MPU6050_MOT_COUNT1)|bit(MPU6050_MOT_COUNT0))
// Alternative names for the combined definitions
#define MPU6050_MOT_COUNT_RESET MPU6050_MOT_COUNT_0
// Combined definitions for the FF_COUNT
#define MPU6050_FF_COUNT_0 (0)
#define MPU6050_FF_COUNT_1 (bit(MPU6050_FF_COUNT0))
#define MPU6050_FF_COUNT_2 (bit(MPU6050_FF_COUNT1))
#define MPU6050_FF_COUNT_3 (bit(MPU6050_FF_COUNT1)|bit(MPU6050_FF_COUNT0))
// Alternative names for the combined definitions
#define MPU6050_FF_COUNT_RESET MPU6050_FF_COUNT_0
// Combined definitions for the ACCEL_ON_DELAY
#define MPU6050_ACCEL_ON_DELAY_0 (0)
#define MPU6050_ACCEL_ON_DELAY_1 (bit(MPU6050_ACCEL_ON_DELAY0))
#define MPU6050_ACCEL_ON_DELAY_2 (bit(MPU6050_ACCEL_ON_DELAY1))
#define MPU6050_ACCEL_ON_DELAY_3 (bit(MPU6050_ACCEL_ON_DELAY1)|bit(MPU6050_ACCEL_ON_DELAY0))
// Alternative names for the ACCEL_ON_DELAY
#define MPU6050_ACCEL_ON_DELAY_0MS MPU6050_ACCEL_ON_DELAY_0
#define MPU6050_ACCEL_ON_DELAY_1MS MPU6050_ACCEL_ON_DELAY_1
#define MPU6050_ACCEL_ON_DELAY_2MS MPU6050_ACCEL_ON_DELAY_2
#define MPU6050_ACCEL_ON_DELAY_3MS MPU6050_ACCEL_ON_DELAY_3
// USER_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_SIG_COND_RESET MPU6050_D0
#define MPU6050_I2C_MST_RESET MPU6050_D1
#define MPU6050_FIFO_RESET MPU6050_D2
#define MPU6050_I2C_IF_DIS MPU6050_D4 // must be 0 for MPU-6050
#define MPU6050_I2C_MST_EN MPU6050_D5
#define MPU6050_FIFO_EN MPU6050_D6
// PWR_MGMT_1 Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_CLKSEL0 MPU6050_D0
#define MPU6050_CLKSEL1 MPU6050_D1
#define MPU6050_CLKSEL2 MPU6050_D2
#define MPU6050_TEMP_DIS MPU6050_D3 // 1: disable temperature sensor
#define MPU6050_CYCLE MPU6050_D5 // 1: sample and sleep
#define MPU6050_SLEEP MPU6050_D6 // 1: sleep mode
#define MPU6050_DEVICE_RESET MPU6050_D7 // 1: reset to default values
// Combined definitions for the CLKSEL
#define MPU6050_CLKSEL_0 (0)
#define MPU6050_CLKSEL_1 (bit(MPU6050_CLKSEL0))
#define MPU6050_CLKSEL_2 (bit(MPU6050_CLKSEL1))
#define MPU6050_CLKSEL_3 (bit(MPU6050_CLKSEL1)|bit(MPU6050_CLKSEL0))
#define MPU6050_CLKSEL_4 (bit(MPU6050_CLKSEL2))
#define MPU6050_CLKSEL_5 (bit(MPU6050_CLKSEL2)|bit(MPU6050_CLKSEL0))
#define MPU6050_CLKSEL_6 (bit(MPU6050_CLKSEL2)|bit(MPU6050_CLKSEL1))
#define MPU6050_CLKSEL_7 (bit(MPU6050_CLKSEL2)|bit(MPU6050_CLKSEL1)|bit(MPU6050_CLKSEL0))
// Alternative names for the combined definitions
#define MPU6050_CLKSEL_INTERNAL MPU6050_CLKSEL_0
#define MPU6050_CLKSEL_X MPU6050_CLKSEL_1
#define MPU6050_CLKSEL_Y MPU6050_CLKSEL_2
#define MPU6050_CLKSEL_Z MPU6050_CLKSEL_3
#define MPU6050_CLKSEL_EXT_32KHZ MPU6050_CLKSEL_4
#define MPU6050_CLKSEL_EXT_19_2MHZ MPU6050_CLKSEL_5
#define MPU6050_CLKSEL_RESERVED MPU6050_CLKSEL_6
#define MPU6050_CLKSEL_STOP MPU6050_CLKSEL_7
// PWR_MGMT_2 Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_STBY_ZG MPU6050_D0
#define MPU6050_STBY_YG MPU6050_D1
#define MPU6050_STBY_XG MPU6050_D2
#define MPU6050_STBY_ZA MPU6050_D3
#define MPU6050_STBY_YA MPU6050_D4
#define MPU6050_STBY_XA MPU6050_D5
#define MPU6050_LP_WAKE_CTRL0 MPU6050_D6
#define MPU6050_LP_WAKE_CTRL1 MPU6050_D7
// Combined definitions for the LP_WAKE_CTRL
#define MPU6050_LP_WAKE_CTRL_0 (0)
#define MPU6050_LP_WAKE_CTRL_1 (bit(MPU6050_LP_WAKE_CTRL0))
#define MPU6050_LP_WAKE_CTRL_2 (bit(MPU6050_LP_WAKE_CTRL1))
#define MPU6050_LP_WAKE_CTRL_3 (bit(MPU6050_LP_WAKE_CTRL1)|bit(MPU6050_LP_WAKE_CTRL0))
// Alternative names for the combined definitions
// The names uses the Wake-up Frequency.
#define MPU6050_LP_WAKE_1_25HZ MPU6050_LP_WAKE_CTRL_0
#define MPU6050_LP_WAKE_2_5HZ MPU6050_LP_WAKE_CTRL_1
#define MPU6050_LP_WAKE_5HZ MPU6050_LP_WAKE_CTRL_2
#define MPU6050_LP_WAKE_10HZ MPU6050_LP_WAKE_CTRL_3
// Default I2C address for the MPU-6050 is 0x68.
// But only if the AD0 pin is low.
// Some sensor boards have AD0 high, and the
// I2C address thus becomes 0x69.
#define MPU6050_I2C_ADDRESS 0x68
// Declaring an union for the registers and the axis values.
// The byte order does not match the byte order of
// the compiler and AVR chip.
// The AVR chip (on the Arduino board) has the Low Byte
// at the lower address.
// But the MPU-6050 has a different order: High Byte at
// lower address, so that has to be corrected.
// The register part "reg" is only used internally,
// and are swapped in code.
typedef union accel_t_gyro_union
{
struct
{
uint8_t x_accel_h;
uint8_t x_accel_l;
uint8_t y_accel_h;
uint8_t y_accel_l;
uint8_t z_accel_h;
uint8_t z_accel_l;
uint8_t t_h;
uint8_t t_l;
uint8_t x_gyro_h;
uint8_t x_gyro_l;
uint8_t y_gyro_h;
uint8_t y_gyro_l;
uint8_t z_gyro_h;
uint8_t z_gyro_l;
} reg;
struct
{
int16_t x_accel;
int16_t y_accel;
int16_t z_accel;
int16_t temperature;
int16_t x_gyro;
int16_t y_gyro;
int16_t z_gyro;
} value;
};
void setup() { //INICIO VOID SETUP
////Resetea la EEPROM la primera vez que la usamos
//EEPROM.setMemPool(0,512); //Establecemos inicio y tamaño de EEPROM de la tarjeta utilizada
//EEPROM.setMaxAllowedWrites(128); //Mínimo para que pueda hacerse el primer borrado completo
////rellenamos de 0 los datos de EEPROM
////Attiny85 tiene 512 Bytes de EEPROM; ajustar según el que uséis
//if (EEPROM.readLong(508)!=4011983) { //En ese punto, preferiblemente al final, guardo un valor para saber si ya la he reseteado
// for(int i=0; i<500; i=i+4) { //Ajustar el valor según el tamaño de la (EEPROM)-8
// EEPROM.update(i,0);
// }
// EEPROM.update(508,4011983); //Almacenamos un número indicativo de que ya se ha inicializado en la última posición
// //Serial.println("Borrado de EEPROM terminado"); //sólo debería aparecer 1 vez
//}
//Líneas de configuración del WatchDog Timer
/*** Setup the WDT ***/
/* Clear the reset flag. */
MCUSR &= ~(1 << WDRF);
/* In order to change WDE or the prescaler, we need to
set WDCE (This will allow updates for 4 clock cycles).
*/
WDTCSR |= (1 << WDCE) | (1 << WDE);
/* set new watchdog timeout prescaler value */
//WDP3 - WDP2 - WPD1 - WDP0 - time
// 0 0 0 0 16 ms
// 0 0 0 1 32 ms
// 0 0 1 0 64 ms
// 0 0 1 1 0.125 s
// 0 1 0 0 0.25 s
// 0 1 0 1 0.5 s
// 0 1 1 0 1.0 s
// 0 1 1 1 2.0 s
// 1 0 0 0 4.0 s
// 1 0 0 1 8.0 s
WDTCSR = 1 << WDP2 | 1 << WDP1; /* 1.0 seconds */
//WDTCSR = 1<<WDP2 | 1<<WDP1 | 1<<WDP0; /* 2.0 seconds */
//WDTCSR = 1<<WDP3; /* 4.0 seconds */
//WDTCSR = 1<<WDP0 | 1<<WDP3; /* 8.0 seconds */
/* Enable the WD interrupt (note no reset). */
WDTCSR |= _BV(WDIE);
//Definir pines
//You need not set pin mode for analogRead - though if you have set the pin to
//output and later want to read from it then you need to set pinMode(0,INPUT);
//where 0 is the physical pin number not the analog input number.
//pinMode(PIN, OUTPUT);
pinMode(relePIN, OUTPUT);
pinMode(ledPIN, OUTPUT);
pinMode(zumbPIN, OUTPUT);
pinMode(voltajePIN, INPUT);
//Pin para reactivar el motor (tendríamos que conectarlo a Tierra (GND) para activarlo)
pinMode(intPIN, INPUT);
digitalWrite(intPIN, HIGH); //Ponemos el pin en HIGH mediante su resistencia interna (pullup), evitando interferencias
digitalWrite(relePIN, HIGH); //Encendemos la bici al conectarlo
pixels.begin(); // This initializes the NeoPixel library.
//Encendemos los LEDs para indicar puesta en marcha y comprobar que los colores funcionan
//Eliminar esto si necesitamos más memoria para el programa
// pixels.Color convierte valores RGB, de 0,0,0 hasta 255,255,255; (verde, rojo, azul)
pixels.setPixelColor(0, pixels.Color(0, 150, 0)); //Encendemos rojo
pixels.show(); // Envía el color actualizado al hardware.
delay(200);
pixels.setPixelColor(0, pixels.Color(150, 0, 0));
pixels.show(); //Verde
delay(200);
pixels.setPixelColor(0, pixels.Color(0, 0, 150));
pixels.show(); //Azul
delay(200);
for (int x = 0; x < 1; x++) { //Hacemos parpadear todos dos veces
pixels.setPixelColor(0, pixels.Color(100, 100, 100)); //Blanco
pixels.show();
delay(300);
pixels.setPixelColor(0, pixels.Color(0, 0, 0)); //apagado
pixels.show();
delay(300);
}
//millisInicio=millis();
//********** Código siguiente para el MPU-6050
int error;
uint8_t c;
Serial.begin(9600);
Serial.println(F("InvenSense MPU-6050"));
Serial.println(F("June 2012"));
// Initialize the 'Wire' class for the I2C-bus.
Wire.begin();
// default at power-up:
// Gyro at 250 degrees second
// Acceleration at 2g
// Clock source at internal 8MHz
// The device is in sleep mode.
//
error = MPU6050_read (MPU6050_WHO_AM_I, &c, 1);
Serial.print(F("WHO_AM_I : "));
Serial.print(c, HEX);
Serial.print(F(", error = "));
Serial.println(error, DEC);
// According to the datasheet, the 'sleep' bit
// should read a '1'.
// That bit has to be cleared, since the sensor
// is in sleep mode at power-up.
error = MPU6050_read (MPU6050_PWR_MGMT_1, &c, 1);
Serial.print(F("PWR_MGMT_1 : "));
Serial.print(c, HEX);
Serial.print(F(", error = "));
Serial.println(error, DEC);
Serial.println("Ringmaster 2016");
Serial.println("Iniciamos programa");
} //FINAL VOID SETUP
void loop() { //INICIO LOOP PRINCIPAL ***********************
lee_MPU6050(); //Coge los datos de aceleración del MPU-6050
// CÓDIGO OBTENCIÓN VOLTAJE **************************
//Recoge 3 muestras de voltaje batería para sacar medias; el condensador se encarga de mantener un valor fijo
//Serial.println("Leemos valores");
for (int x = 0; x < 3; x++) {
//coge el voltaje en milivoltios, pasamos a voltios con la rutina doubleMap ahorrando memoria
voltaje[x] = doubleMap(analogRead(voltajePIN), 0, 1023, 0, 5)/(celdas/10); //Pasamos los valores de entre 0 a 1023 a valores entre 0 y 5V, y dividimos entre el número de celdas
delay(15); // espera entre lecturas
}
//Ordenamos para descartar bajo y alto
for (int x = 0; x < 3; x++) {
for (int y = 0; y < 3; y++) {
if (voltaje[y] < voltaje[y + 1]) {
value = voltaje[y];
voltaje[y] = voltaje[y + 1];
voltaje[y + 1] = value;
}
}
}
//Obtenemos voltaje
value = (double)voltaje[1]+ajusteVolt;
//DEBUG
Serial.print("Voltaje=");
Serial.println(value);
Serial.print("Contador=");
Serial.println(contador);
delay(100);
// ******* FIN CÓDIGO OBTENCIÓN VOLTAGE *******************
//Comprobamos si la bici está en movimiento
if (accelX > (accelXAnt + sensibilidadAccel) or accelY > (accelYAnt + sensibilidadAccel) or accelZ > (accelZAnt + sensibilidadAccel)) {
movimiento=true;
contador=0; //Contador para la cuenta atrás de tiempo para apagarlo
}
else {
contador++;
movimiento=false;
}
//DEBUG
// Serial.print("Alarma en: ");
// if (accelX>accelXAnt+sensibilidadAccel) {
// Serial.println("X");
// }
// if (accelY>accelYAnt+sensibilidadAccel) {
// Serial.println("Y");
// }
// if (accelZ>accelZAnt+sensibilidadAccel) {
// Serial.println("Z");
// }
// Serial.print(F("accel x,y,z: "));
// Serial.print(accelX, DEC);
// Serial.print(F(", "));
// Serial.print(accelY, DEC);
// Serial.print(F(", "));
// Serial.print(accelZ, DEC);
// Serial.println(F(""));
// Serial.println(esperaAlarma);
//Guardamos valores anteriores
accelXAnt = accelX;
accelYAnt = accelY;
accelZAnt = accelZ;
// COMPROBAMOS ESTADO DE INTERRUPTOR; PENDIENTE PASARLO A INT. HARDWARE
//Para velocidad de respuesta; si se detecta activación manual del interruptor, apagamos LED indicador y desconectamos relé
//El resto del código se ejecutará 1 vez cada 1 segundos.
//for(int x=1; x<5; x++) {
if (digitalRead(intPIN) == LOW and encendido == true) {
apagaTodo();
}
else if (digitalRead(intPIN) == LOW and encendido == false) { //Encendemos bici; si está baja de batería se indicará con la luz/panel
enciendeTodo();
}
if (encendido == true) {
//Aquí se evalúa el color del led según los valores del voltaje, el condensador evita que fluctúe
if (value <= mVoltCarga[2]) { //ROJO; Recargar lo antes posible
pixels.setPixelColor(0, pixels.Color(0, luminLED, 0));
}
else if (value <= mVoltCarga[3] && value > mVoltCarga[2]) { //NARANJA; se parece más al rojo
pixels.setPixelColor(0, pixels.Color(luminLED * 0.3, luminLED * 0.7, luminLED * 0.1)); //Entre el 20 y el 30%; momento de recargar la batería
}
else if (value <= mVoltCarga[4] && value > mVoltCarga[3]) { //AMARILLO color 3
pixels.setPixelColor(0, pixels.Color(luminLED * 0.4, luminLED * 0.5, 0)); //Aconsejable recargar batería
}
else if (value <= mVoltCarga[5] && value > mVoltCarga[4]) { //VERDE color 4
pixels.setPixelColor(0, pixels.Color(luminLED * 0.5, 0, 0)); //Le bajo la intensidad todavía más; al fin y al cabo, siempre estará encendido
}
else if (value <= mVoltCarga[6] && value > mVoltCarga[5]) { //AZUL color 5
pixels.setPixelColor(0, pixels.Color(0, 0, luminLED)); //Se ha sobrecargado; recomendable no llegar al azul para maximizar vida útil
}
else if (value > mVoltCarga[6]) { //>100% VIOLETA 6
pixels.setPixelColor(0, pixels.Color(0, luminLED * 0.6, luminLED * 0.75)); //Por encima de lo recomendado; PELIGROSO
}
pixels.show(); //Actualizamos el color del led
//Si detectamos que la bici no se usa durante el tiempo indicado, apagamos todo, hasta que no se pulse en interruptor del P2 no vuelve a continuar
if (contador > (minutos * 60)) { //Al hacer tres comprobaciones dentro del tiempo marcado, nos aseguramos
//Ha pasado el tiempo sin uso; apagamos todo
apagaTodo();
}
} //**** FIN IF ENCENDIDO ********************
else { //Está en modo bajo consumo, led APAGADO
// *********** CÓDIGO ALARMA ANTIRROBO ****************************
if (esperaAlarma>0) { //Descontamos tiempo de espera
esperaAlarma--;
}
//Comprobamos la aceleración comparando con datos anteriores; si se superan en sensibilidadAccel, alquien lo está manipulando
if (movimiento==true) {
if (esperaAlarma>0) { //Mientras no pase el tiempo de reposo, ignoramos el movimiento
esperaAlarma=tiempoEspera;
}
else {
alarmaAct++;
pixels.setPixelColor(0, pixels.Color(0, luminLED, 0));
pixels.show();
if (alarmaAct > 2 and alarmaAct <= 6) {
digitalWrite(relePIN, HIGH);
for (int x = 0; x < (alarmaAct * 3); x++) { //Intermitencia de zumbador
digitalWrite(zumbPIN, HIGH);
delay(100);
digitalWrite(zumbPIN, LOW);
delay(140);
if (x>1) {
digitalWrite(relePIN, LOW); //Activamos sólo por 0,5 Segundos el relé y luces
}
}
}
}
}
if (alarmaAct > 6) { //Estando la alarma activada se desactiva la espera final, por lo que es constante la alarma
alarmaAct++;
digitalWrite(relePIN, HIGH); //Enciende relé y con ello luces
for (int x = 0; x < 10; x++) { //Hace sólo 10 veces esta operación, dejando quitar la alarma con el botón
if (x>4) {
digitalWrite(relePIN, LOW); //Apaga tras 0,6 segundos (respuesta lenta del foco, hacemos parpadear)
}
digitalWrite(zumbPIN, HIGH);
digitalWrite(relePIN, HIGH); //Encendemos todo intermitentemente
pixels.setPixelColor(0, pixels.Color(0, luminLED, 0));
pixels.show();
delay(50);
digitalWrite(zumbPIN, LOW);
pixels.setPixelColor(0, pixels.Color(0, 0, 0));
pixels.show();
digitalWrite(relePIN, LOW);
delay(60);
}
if (alarmaAct > 200) { //Para la alarma
alarmaAct = 0;
}
}
if (alarmaAct==0) { //No hay movimiento, apagamos LED
pixels.setPixelColor(0, pixels.Color(0, 0, 0));
pixels.show();
}
} //Aquí termina el caso en que esté apagado *******************
//Lo siguiente se ejecuta en todos los casos
//Si alcanza un valor donde es necesaria la recarga, avisamos parpadeando la batería
if (value < mVoltCarga[1] and value>mVoltCarga[0] and alarmaAct==0) { //Avisamos del estado de baja batería
parpadeaRojo();
}
//si la batería baja demasiado, avisamos con un pitido breve y parpadeo del led rojo de que urge la carga
//En cualquier caso, si alguna de las celdas baja de 2,75V, el control de carga corta la alimentación de todo
if (value < mVoltCarga[0] and alarmaAct==0) {
if (encendido == false) { //No me interesa que pite mientras ando en la bici
for (int x = 0; x < 2; x++) {
digitalWrite(zumbPIN, HIGH);
delay(150);
digitalWrite(zumbPIN, LOW);
delay(150);
}
parpadeaRojo();
}
}
//Utilizo la EEPROM para valores estadísticos únicamente; se puede eliminar si se considera
/* DATOS GUARDADOS EN EEPROM *PENDIENTE DE HACER
0: Horas funcionamiento Arduino
3: Último voltaje Arduino, para controlar el número de recargas
7: Contador de recargas de baterías
11: Contador de viajes/encendidos
15: Voltaje máximo histórico
19: Voltaje mínimo histórico
23:
27:
31:
*/
////Guardamos las horas de uso en la EEPROM
//if ((millis()-millisInicio)>3600000) { //Ha pasado una hora
// millisInicio=millis();
// EEPROM.update(0,EEPROM.readLong(0)+1); //Añadimos una hora al contador
// }
////Comprobamos valor mínimo y actualizamos
//if (EEPROM.readLong(19)>value) {
// EEPROM.update(19,value);
//}
////Comprobamos valor máximo y actualizamos
//if (EEPROM.readLong(15)<value) {
// EEPROM.update(15,value);
//}
//Si pasa rato sin que la bici se mueva, se resetea contador de movimientos
if (alarmaAct > 0 and alarmaAct < 7) {
contAlarma--;
if (contAlarma == 0) {
alarmaAct = 0;
contAlarma = resetAlarmaSeg;
}
}
if (alarmaAct < 7) { //Para dar velocidad de respuesta
enterSleep(); //Ahorramos batería ya que está el 99% del tiempo "dormido"
}
}//THEEND FIN DE CÓDIGO ***********************************
void parpadeaRojo() { //Rutina de aviso de baja batería, led ROJO intermitente rápido
if (parpadea == false) {
pixels.setPixelColor(0, pixels.Color(0, luminLED, 0)); //color rojo
pixels.show();
parpadea = true;
}
else {
pixels.setPixelColor(0, pixels.Color(0, 0, 0)); //apagado
pixels.show();
parpadea = false;
}
}
void apagaTodo() { //Aquí desconectamos todo para ahorrar energía (durante 1 segundo)
//Prefiero conectar el interruptor entre el PIN y Tierra, con una resistencia que mantenga el pin en HIGH de 10K
//Ya que por ejemplo en el P3, hay una resistencia pull-up y la resistencia externa podría no ser suficiente para ponerlo en LOW
//pero si lo conectamos a Tierra, no habrá duda de que lo ponemos en LOW.
//Hay que tener en cuenta que sólo dormimos la cpu, pero todos los pines quedan con las salidas preestablecidas
digitalWrite(relePIN, LOW); //apagamos todo y ponemos al attiny a dormir
pixels.setPixelColor(0, pixels.Color(0, 0, 0)); //Apagamos LED, ya que es independiente; sigue gastando algo, pero menos
pixels.show(); //Actualizamos
encendido = false;
esperaAlarma = tiempoEspera; //Reseteamos tiempo
alarmaAct = -1; //Dar margen a dejar la bici aparcada
// Encendemos el MPU-6050 para activar alarma en caso de movimiento extraño
MPU6050_write_reg (MPU6050_PWR_MGMT_1, 0);
delay(400); //Damos tiempo a soltar el interruptor
}
void enciendeTodo() { //Aquí conectamos todo lo que nos interese
//Prefiero conectar el interruptor entre el PIN y Tierra, con una resistencia que mantenga el pin en HIGH de 10K
//Ya que por ejemplo en el P3, hay una resistencia pull-up y la resistencia externa podría no ser suficiente para ponerlo en LOW
//pero si lo conectamos a Tierra, no habrá duda de que lo ponemos en LOW.
//Hay que tener en cuenta que sólo dormimos la cpu, pero todos los pines quedan con las salidas preestablecidas
digitalWrite(relePIN, HIGH); //apagamos todo y ponemos al attiny a dormir
// Apagamos también el MPU-6050.
MPU6050_write_reg (MPU6050_PWR_MGMT_1, 1);
encendido = true;
contador = 0;
alarmaAct = 0; //Anulamos alarma
delay(400); //Damos tiempo a soltar el interruptor
}
//RUTINA MAPEO DOBLE
double doubleMap(double x, double in_min, double in_max, double out_min, double out_max)
{
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min;
}
// *************** RUTINAS LECTURA VOLTAJE ***************
//Code from https://donalmorrissey.blogspot.com.es/2010/04/sleeping-arduino-part-5-wake-up-via.html
/***************************************************
Name: ISR(WDT_vect)
Returns: Nothing.
Parameters: None.
Description: Watchdog Interrupt Service. This
is executed when watchdog timed out.
***************************************************/
ISR(WDT_vect)
{
//Aquí el código que queremos se ejecute cuando el watchdog "despierta" al procesador
}
/***************************************************
Name: enterSleep
Returns: Nothing.
Parameters: None.
Description: Enters the arduino into sleep mode.
***************************************************/
void enterSleep(void)
{
set_sleep_mode(SLEEP_MODE_PWR_DOWN); /* EDIT: could also use SLEEP_MODE_PWR_SAVE for less power consumption. */
sleep_enable();
/* Now enter sleep mode. */
// Apagamos también el MPU-6050.
MPU6050_write_reg (MPU6050_PWR_MGMT_1, 1);
sleep_mode();
/* The program will continue from here after the WDT timeout*/
sleep_disable(); /* First thing to do is disable sleep. */
/* Re-enable the peripherals. */
power_all_enable();
// Encendemos también el MPU-6050.
MPU6050_write_reg (MPU6050_PWR_MGMT_1, 0);
}
// RUTINAS DE USO DEL MPU 6050 *************************
// --------------------------------------------------------
// MPU6050_read
//
// This is a common function to read multiple bytes
// from an I2C device.
//
// It uses the boolean parameter for Wire.endTransMission()
// to be able to hold or release the I2C-bus.
// This is implemented in Arduino 1.0.1.
//
// Only this function is used to read.
// There is no function for a single byte.
//
int MPU6050_read(int start, uint8_t *buffer, int size)
{
int i, n, error;
Wire.beginTransmission(MPU6050_I2C_ADDRESS);
n = Wire.write(start);
if (n != 1)
return (-10);
n = Wire.endTransmission(false); // hold the I2C-bus
if (n != 0)
return (n);
// Third parameter is true: relase I2C-bus after data is read.
Wire.requestFrom(MPU6050_I2C_ADDRESS, size, true);
i = 0;
while (Wire.available() && i < size)
{
buffer[i++] = Wire.read();
}
if ( i != size)
return (-11);
return (0); // return : no error
}
// --------------------------------------------------------
// MPU6050_write
//
// This is a common function to write multiple bytes to an I2C device.
//
// If only a single register is written,
// use the function MPU_6050_write_reg().
//
// Parameters:
// start : Start address, use a define for the register
// pData : A pointer to the data to write.
// size : The number of bytes to write.
//
// If only a single register is written, a pointer
// to the data has to be used, and the size is
// a single byte:
// int data = 0; // the data to write
// MPU6050_write (MPU6050_PWR_MGMT_1, &c, 1);
//
int MPU6050_write(int start, const uint8_t *pData, int size)
{
int n, error;
Wire.beginTransmission(MPU6050_I2C_ADDRESS);
n = Wire.write(start); // write the start address
if (n != 1)
return (-20);
n = Wire.write(pData, size); // write data bytes
if (n != size)
return (-21);
error = Wire.endTransmission(true); // release the I2C-bus
if (error != 0)
return (error);
return (0); // return : no error
}
// --------------------------------------------------------
// MPU6050_write_reg
//
// An extra function to write a single register.
// It is just a wrapper around the MPU_6050_write()
// function, and it is only a convenient function
// to make it easier to write a single register.
//
int MPU6050_write_reg(int reg, uint8_t data) {
int error;
error = MPU6050_write(reg, &data, 1);
return (error);
}
void lee_MPU6050() { //Rutina recogida datos MPU
//Código de control del MPU-6050 para la detección de movimiento de la alarma
//Para detectar que alguien mueve el equipo, necesitamos coger la aceleración de cualquiera de los ejes
//MPU6050_write_reg (MPU6050_PWR_MGMT_1, 0); //Activamos GY-521
int error;
double dT;
accel_t_gyro_union accel_t_gyro;
// Read the raw values.
// Read 14 bytes at once,
// containing acceleration, temperature and gyro.
// With the default settings of the MPU-6050,
// there is no filter enabled, and the values
// are not very stable.
error = MPU6050_read (MPU6050_ACCEL_XOUT_H, (uint8_t *) &accel_t_gyro, sizeof(accel_t_gyro));
// Serial.print(F("Read accel, temp and gyro, error = "));
// Serial.println(error,DEC);
// Swap all high and low bytes.
// After this, the registers values are swapped,
// so the structure name like x_accel_l does no
// longer contain the lower byte.
uint8_t swap;
#define SWAP(x,y) swap = x; x = y; y = swap
SWAP (accel_t_gyro.reg.x_accel_h, accel_t_gyro.reg.x_accel_l);
SWAP (accel_t_gyro.reg.y_accel_h, accel_t_gyro.reg.y_accel_l);
SWAP (accel_t_gyro.reg.z_accel_h, accel_t_gyro.reg.z_accel_l);
SWAP (accel_t_gyro.reg.t_h, accel_t_gyro.reg.t_l);
SWAP (accel_t_gyro.reg.x_gyro_h, accel_t_gyro.reg.x_gyro_l);
SWAP (accel_t_gyro.reg.y_gyro_h, accel_t_gyro.reg.y_gyro_l);
SWAP (accel_t_gyro.reg.z_gyro_h, accel_t_gyro.reg.z_gyro_l);
// Print the raw acceleration values
accelX = accel_t_gyro.value.x_accel;
accelY = accel_t_gyro.value.y_accel;
accelZ = accel_t_gyro.value.z_accel;
//MPU6050_write_reg (MPU6050_PWR_MGMT_1, 1); //Volvemos a desactivar para ahorrar energía
}
El programa básicamente hace esto: Informa, cambiando cada segundo el color de un LED, de la carga de la primera celda (sin necesidad de resistencias) del voltaje de la batería (mediante divisor de voltaje), teniendo en cuenta el número de celdas, y con un condensador para estabilizar el valor. Y con el acelerómetro, comprueba por un lado, cuando está encendido, si no hay movimiento en 5 minutos (parámetro configurable), desconecta el relé, apagando la bici y luces. En ese estado, tras 20 segundos, activa el transistor de la alarma si hay movimiento (primero brevemente como advertencia, y luego intermitentemente durante varios minutos). Cada vez que se ejecuta el programa, para ahorrar algo de energía, dormimos el procesador y acelerómetro durante un segundo.
Actualización 24/01/17: No se puede alimentar directamente un pin analógico del At328, pues parece ser que, en caso de bajada brusca del voltaje de 5V principal, absorve energía por el pin, de forma que termina inutilizándolo. Hay que utilizar una resistencia que limite el paso de corriente a 10mA o menos (para evitar también gasto innecesario de energía). Me ha pasado que con esta configuración, se ha quemado el A0 y A1 en el momento en que el control ha cortado el paso de electricidad al pin «5V». Otro cambio es alimentar el At328 directamente a la batería para evitar esto. Iré poniendo en el blog entradas con las mejoras sucesivas.
Materiales utilizados
- Arduino Nano (Atmel 328 a 16 Mhz), con 30 Ks de FLASH libres y 2 Ks de SRAM para las variables, suficiente para todo lo que se nos ocurra:
 |
| En la foto protegiéndolo del agua con EPOXI transparente (he eliminado el LED de ON) |
- Led RGB PL-9823 con micro integrado, mucho mejor que un LED RGB normal, ya que presenta muchas más ventajas; no necesitamos resistencias (suministrar 5V y listo), y el color de mezcla es exactamente el que queremos (regulando digitalmente de 0 a 255 cada color) con el Arduino.
 |
| Es más gordo que un RGB normal al llevar un microcontrolador incorporado |
Y además se pueden conectar en serie para hacer genialidades como ésta:

Estos LEDS RGB son el último avance al integrar el controlador en el mismo chip, por lo que basta con pasarle los datos del color que queremos al chip indicado para que inmediatamente cambie, sin necesidad de resistencias para bajar el voltaje (en un RGB normal cada color utiliza una resistencia diferente).
| Imagen: Adafruit.com |
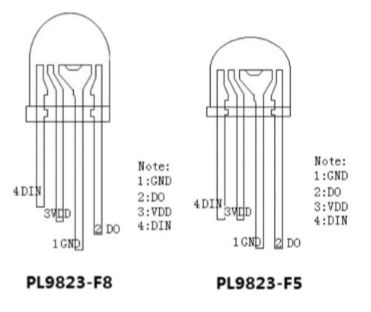 |
| Tenemos de diferentes alturas; de 8mm el F8 y de 5 mm el F5 |
-
Acelerómetro MPU-6050 (encapsulado GY-521) con el que detectaremos movimientos, aceleraciones, etc (tiene hasta sensor de temperatura):

- Un MOSFET de canal N de 0,5A al menos que se active con 5V; el típico 2N2222 nos vale, para activar el altavoz que servirá de alarma.
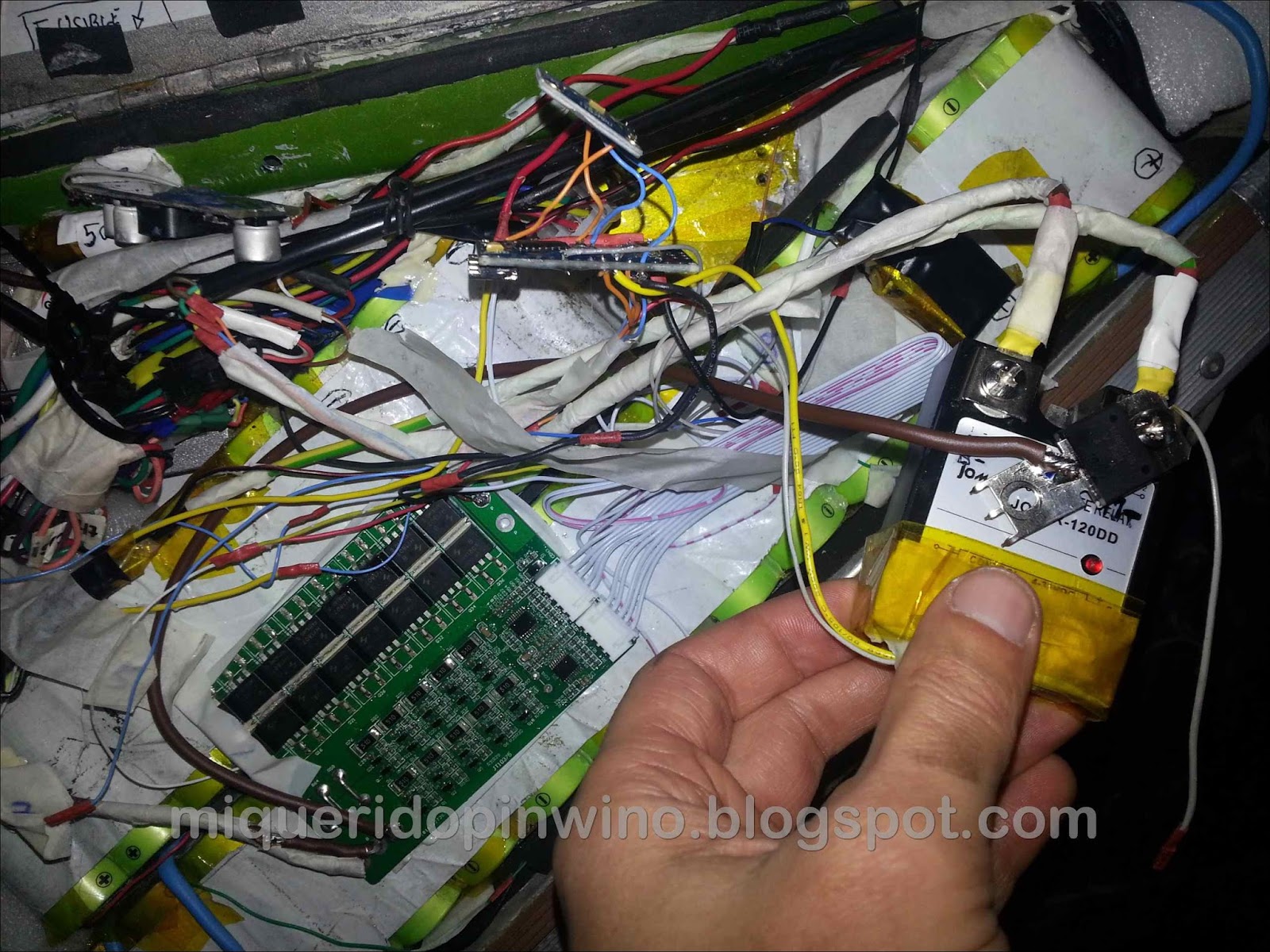
- Un relé electrónico o SSR (Solid State Relay) de 80A DC (reales):

- Un altavoz/zumbador piezoeléctrico, lo más potente posible para desalentar a los cacos:

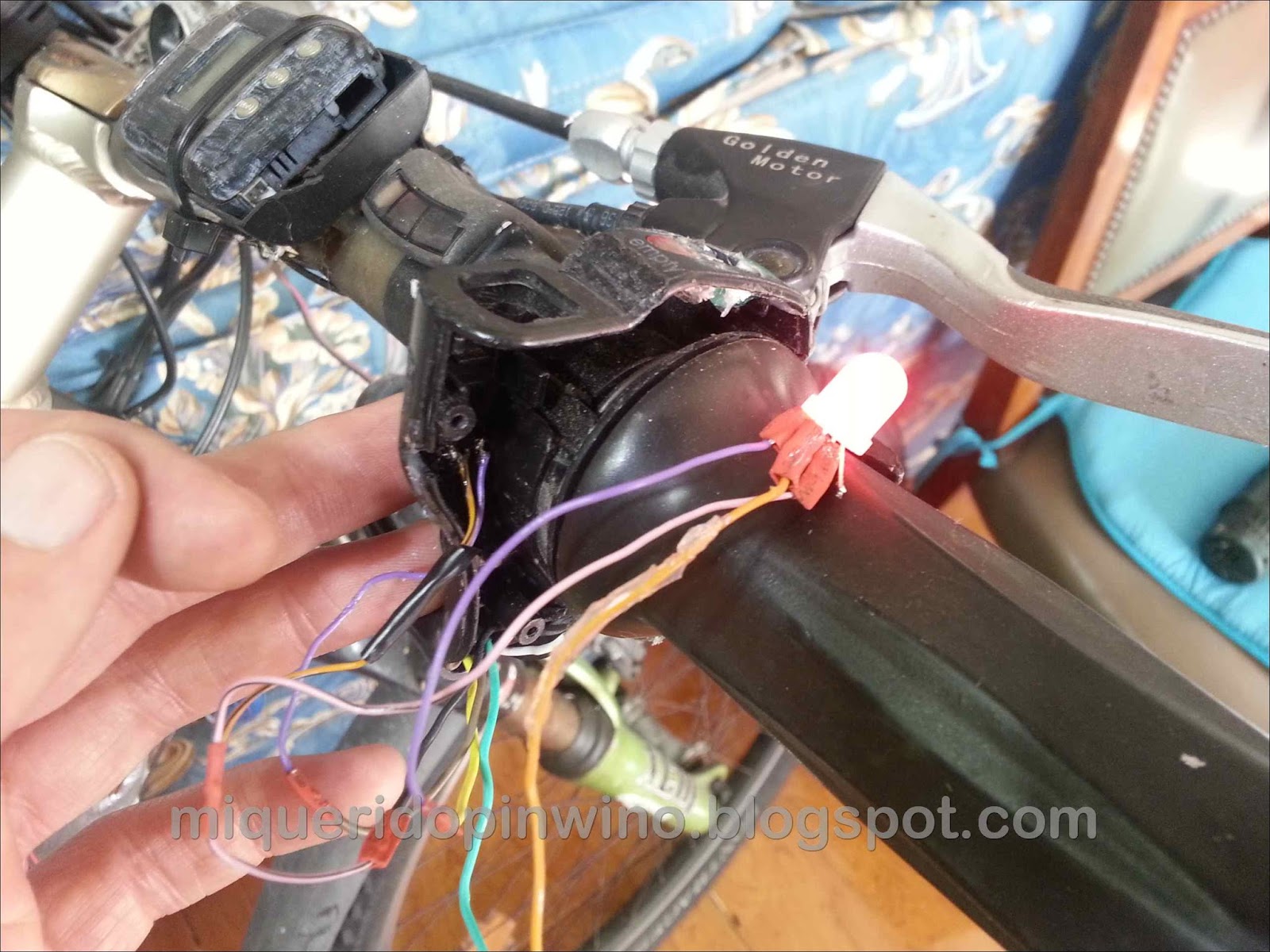
Instalando el LED RGB
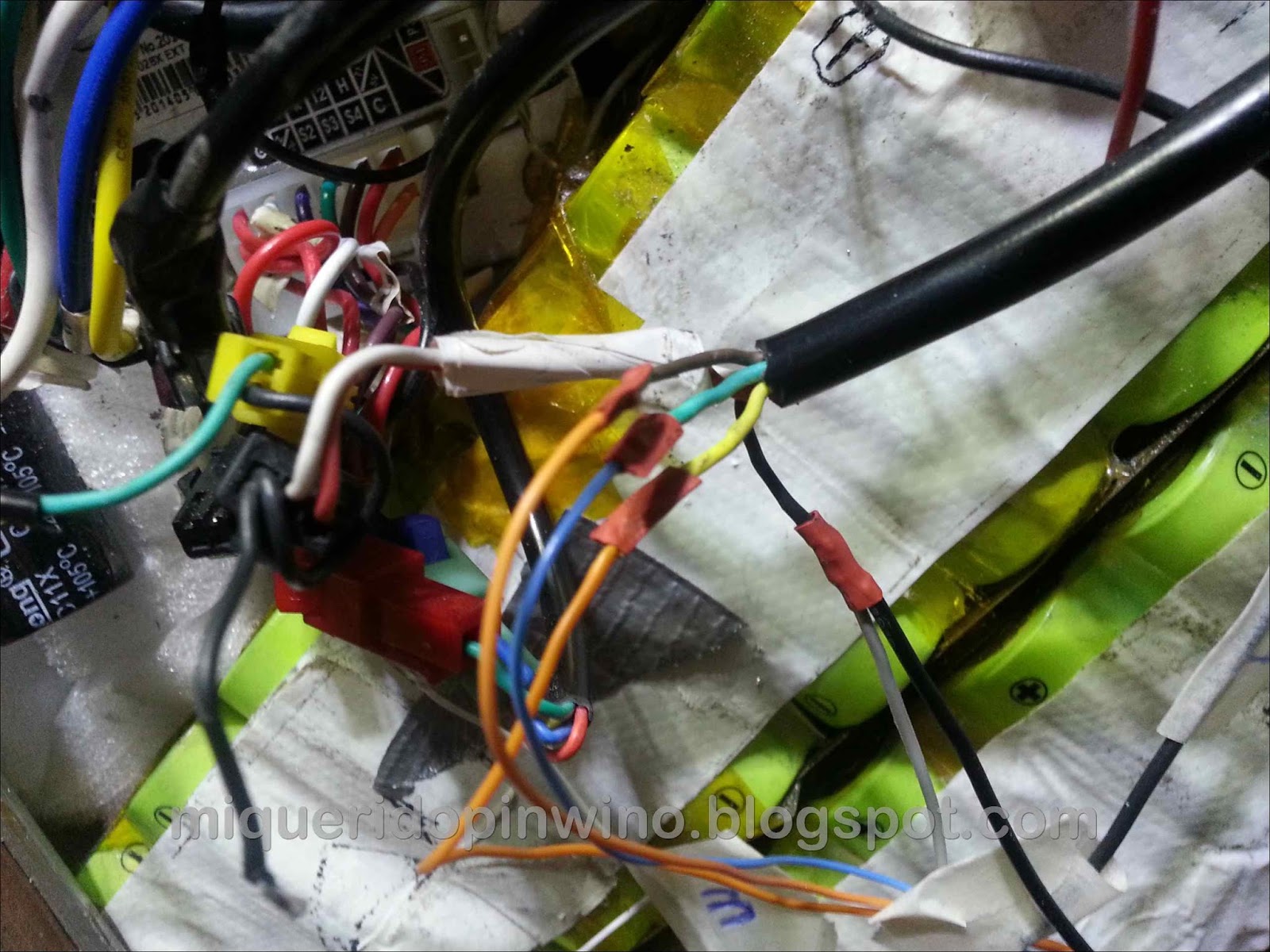
Abrí la parte de electrónica del acelerador Golden Motor; la electrónica estaba preparada para 48V así que no me servía; 3 cables se utilizan para el sensor Hall del acelerador (no puedo usar la masa del acelerador como masa común por las derivaciones que hay en el controlador BAC-0281P, y que terminarían sobrecalentando el sensor, lo tengo comprobado) y el resto para la electrónica e interruptor de marcha atrás (que yo voy a aprovechar para encender/apagar la luz de cruce y poder intercambiar entre las 3 intensidades lumínicas), y que he aprovechado para el LED y microinterruptor oculto para activar/desactivar la bici en las paradas breves (y activación de la alarma antirrobo). Sólo he tenido que añadir un cable negro por fuera de la manguera de cables para Tierra.
La bici no tiene llave de encendido, pero utilizo un interruptor oculto a la vista para activarla/desactivarla, y otro interruptor para desactivar la lectura del voltaje y evitar desbalancear la primera celda cuando no se usa.


 |
| Regulador de voltaje tapado con cinta carrocero dejando a la vista sólo el tornillo de regulación |
 |
| Un eficiente regulador 3-40V que monta un LM2596S, con un disipador pegado con silicona |


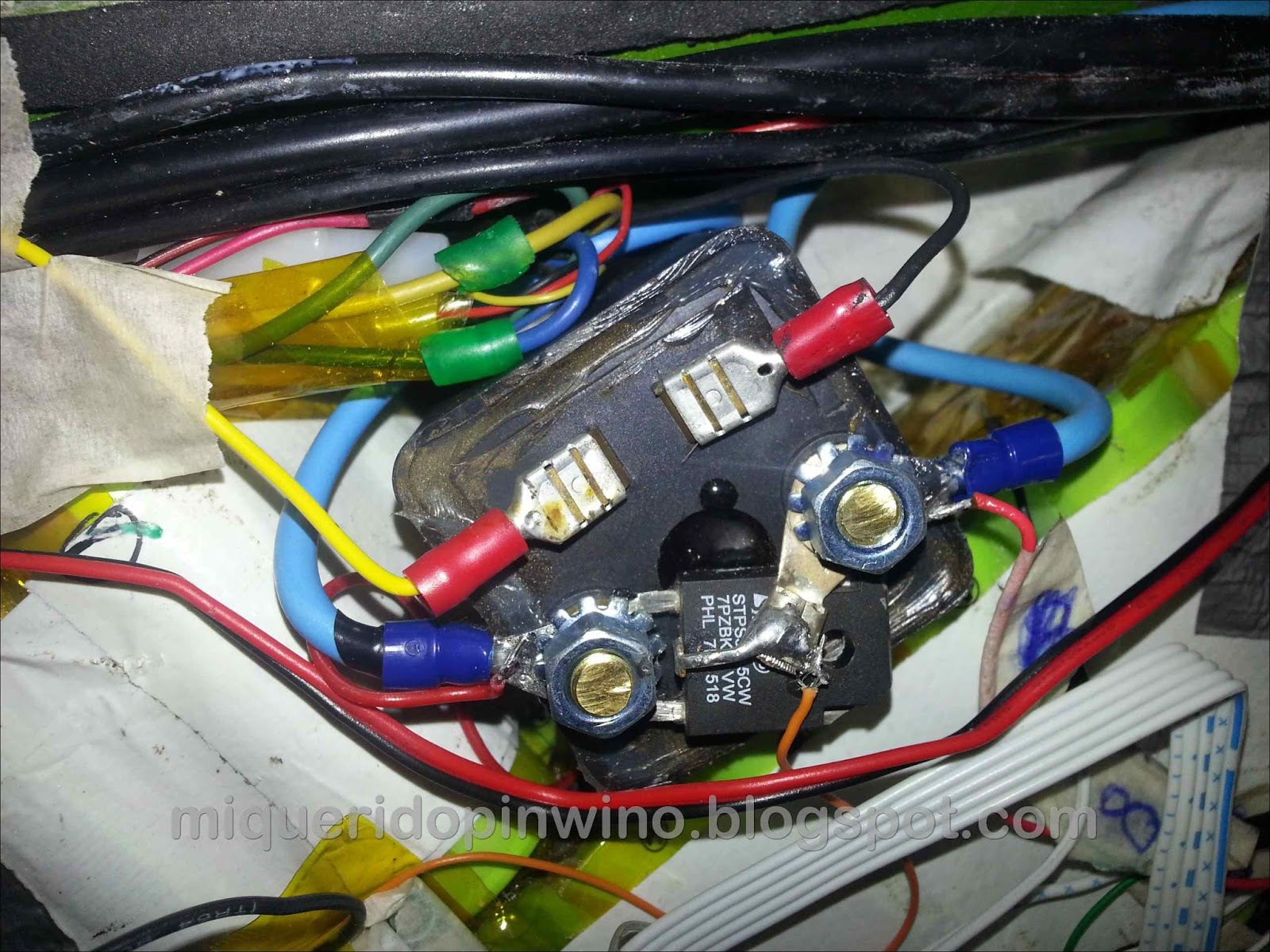
Sustituyendo el relé mecánico por uno de Estado Sólido (semiconductor)
Por otro lado, hasta ahora utilizaba en la bici un relé mecánico de 100A y 12V (típico utilizado en vehículos), que activaba con un pequeño interruptor conectado a la tercera celda de la batería (3,3×3=9,9V), y que ocupaba bastante:
Ya no es la primera vez que utilizo y os hablo sobre este tipo de relés electrónicos, de sus ventajas e inconvenientes. Empleé uno de ellos en un coche (con mal resultado por su baja calidad), pero muy útiles y longevos si se usan dentro de sus límites.
 |
| El diodo que se ve deriva la corriente a la batería en todos los casos para proteger el control ante largas cuestas. |
Además, otro punto muy importante, como se ve en la imagen de arriba, hay que colocarle un diodo que permita que la energía del motor fluya a las baterías en caso de que se desconecte el relé, porque, si por cualquier circunstancia se desactivara bajando una larga pendiente, podríamos freír los MOSFET del controlador de la bici (así se indica en su manual), ya que tendría que disiparse toda la energía en ellos, pudiendo sobrecalentarse y estropearse. Y debe conectarse directamente a la batería, evitando el BMS, como se ve en la imagen, ya que el BMS tiende a desconectar la carga en caso de que alguna celda supere un determinado voltaje (3,75V suele ser), pero es preferible sobrecalentar las seguras LiFePo a freír el controlador (si usáis baterías de otra química entonces no podréis hacer esto, o corréis el riesgo de que empiecen a arder).
Lo malo de este tipo de relés económicos es que tiene bastantes pérdidas en estado de no-conducción; en este caso 1Kohm, deja pasar 33 mAh (33V/1000ohm ley de ohm) pero no hay problema pues el consumo del Control del motor es inferior a eso, y mínimo tarda 1 mes en agotar la batería, y en ese momento el BMS corta la alimentación. De todas formas, si queremos eliminar casi del todo esa pérdida, en lugar del relé de estado sólido, podemos utilizar 2 MOSFETS en paralelo con baja corriente de activación como el IRBL3036:
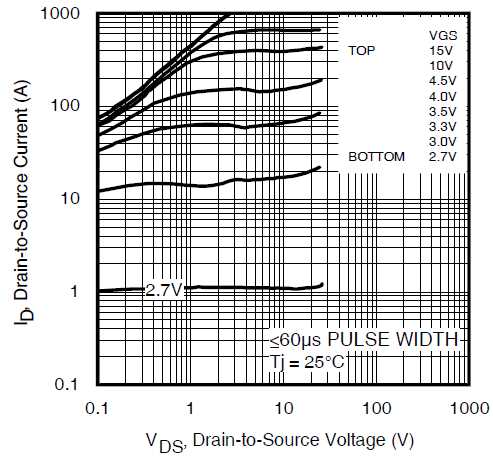
o también transistores Darlington NPN (1 o más en paralelo, dependiendo del amperaje), que vienen en un sólo encapsulado y tienen bajas pérdidas, y que se activan con poco amperaje:
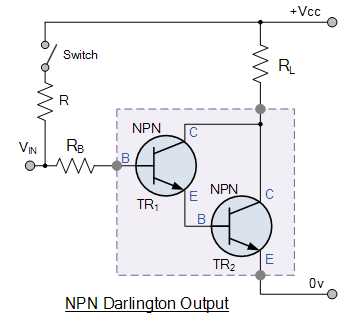

 |
| En la parte superior junto al fusible de 50A se aprecia el regulador de voltaje que alimenta al Arduino Nano |
Posdata y pruebas/tests previos con el Attiny85

 |
Así que os dejo aquí hasta donde llegué con el programa para él, sin depurar demasiado, mostraba en el RGB conectado el estado de la celda LiFePo4 mediante colores, por si sirve a alguien:
/* ==================================================================
Sketch control de batería, pensado para su funcionamiento en un Attiny85
Activa un LED RGB según el voltaje y tipo batería (Divisor voltaje)
Morado sobrecarga, azul 90-100%, verde 50-90%, amarillo del 30 al 40%,
naranja del 20 al 30%, rojo 10 al 20% y rojo parpadeante por debajo del 10%
Autor: David Losada, basado en trabajos previos de otros autores:
Parte de código de la referencia rápida del Digispark: https://digistump.com/wiki/digispark/quickref
Version: 0.5 bajo licencia GPLv3
Fecha: octubre 2016
Includes NeoPixel Ring simple sketch code from (c) 2013 Shae Erisson
released under the GPLv3 license to match the rest of the AdaFruit NeoPixel library
================================================================== */
//#include <EEPROMex.h> //La librería Neopixel ocupa demasiado en el ATtiny; anulo toda la parte de guardado de datos estadísticos
#include <Adafruit_NeoPixel.h> //Para el control del led
//from https://bigdanzblog.wordpress.com/2014/08/10/attiny85-wake-from-sleep-on-pin-state-change-code-example/
#include <avr/sleep.h>
#include <avr/interrupt.h> //creo que al final no se usa, pero mejor dejarla (el compilador no la incluye si no se usa, por lo que no ocupa)
//******************* A CAMBIAR SEGÚN TU CONFIGURACIÓN ********************************
//Relación de voltaje y estado de carga de la batería; se puede agregar para cualquier tipo de batería, siempre teniendo en cuenta que estaremos comprobando sólo una celda de hasta 5V
//por lo que es imprescindible utilizar un BMS de equilibrado de celdas en la carga para evitar problemas con las celdas no monitorizadas
//Descomentamos el tipo de batería que queramos utilizar
//(VALORES %: 1%,8%,20%,30%,40%,90%,100%)
const double mVoltCarga[7]={2.8,3.10,3.17,3.198,3.22,3.4,3.6}; //tabla de relación de voltajes y carga de LIFEPO (recomendado calibrar (más abajo se indica), por la pequeña diferencia entre estados)
//const double mVoltCarga[7]={3,3.2,3.3,3.6,3.65,4.05,4.2}; //tabla de relación de voltajes y carga de LiCo y LiPo
const byte luminLED=150; //De 20 a 255, el valor de luminosidad máxima según el LED (para ahorro de energía y duración del LED recomendado valores <150)
const double refIntVolt=1.088; //Aquí se calibra el valor de ref. int de 1,1V, que puede variar de 1,09 a 1,2V
const byte minutos=10; //Después de estos minutos,si no hay variación de voltaje, desconectamos electrónica (relé y lámpara)
//Definición pines analógicos monitorización batería
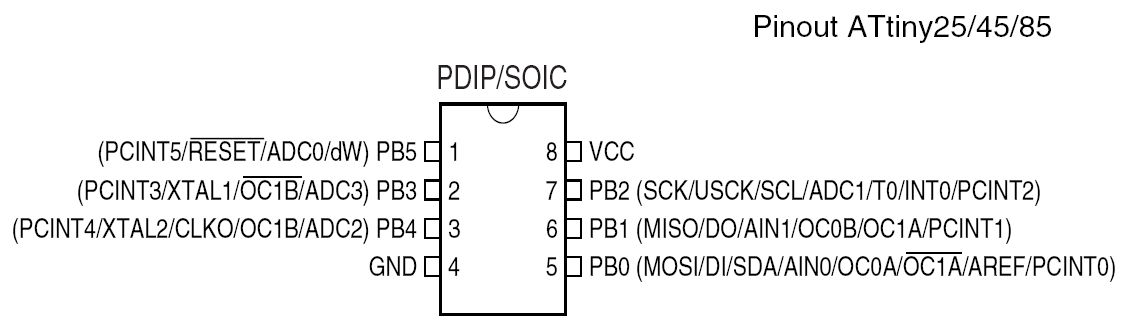
//En el ATTiny85 las entradas son (1)=P2; (2)=P4; (3)=P3; (0)=P5 y pines PWM P0, P1 y P4
#define relePIN 0 //Conectar la batería y luces; desconectar cuando la batería baje de 2,8V
#define intPIN 2 //PB2 is INT0 pin; Pin de interruptor para encender Y apagar bici (activar relé), *** HAY QUE CONECTARLO A GND (Tierra) para activarlo
#define ledPIN 1 //Pin del LED incorporado, para hacerlo parpadear, en el ATTiny85 B es el 1
#define zumbPIN 5 //Para activar zumbador intermitentemente cuando la batería baje del 5%
//Definición LED RGB Neopixel PL-9823-F5/F8 https://surrealitylabs.com/2014/08/playing-with-the-pl9823-f5-a-breadboardable-neopixel-compatible-led/
// Which pin on the Arduino is connected to the NeoPixels?
#define PIN 4 //Salida que usamos para la comunicación digital con el LED RGB
// Número de Neopixels conectados al Arduino
#define NUMPIXELS 1
//*************************************************************************************
unsigned long millisInicio=0; //Para comprobar paso de horas
unsigned long millisUso=0; //Tiempo en milisegundos cada vez que comprobamos si se está usando, y si no desconectamos para ahorrar batería
unsigned long millisVoltaje=0; //Segunda comprobación voltaje
boolean parada=false; //Para doble chequeo de parada
boolean voltIgual=false; //Chequeo se vuelve a cumplir; sería raro que coincidiera dos veces seguidas si no está parada
boolean alarma=false; //Hacer la alarma intermitente
boolean parpadea=false; //Para parpadear rojo
double voltajeAnt=0; //Guardar voltaje anterior
double voltaje[6]={0,0,0,0,0,0}; //Valores obtenidos muestras
double value=0; //Voltaje obtenido
unsigned long timeLED=0; //Almacenar tiempo transcurrido
byte color=0; //Para guardar el color anterior
// When we setup the NeoPixel library, we tell it how many pixels, and which pin to use to send signals.
// Note that for older NeoPixel strips you might need to change the third parameter--see the strandtest
// example for more information on possible values.
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
void setup() {
////Resetea la EEPROM la primera vez que la usamos (NO TENGO ESPACIO PARA USAR ESTO)
//EEPROM.setMemPool(0,512); //Establecemos inicio y tamaño de EEPROM de la tarjeta utilizada
//EEPROM.setMaxAllowedWrites(128); //Mínimo para que pueda hacerse el primer borrado completo
////rellenamos de 0 los datos de EEPROM
////Attiny85 tiene 512 Bytes de EEPROM; ajustar según el que uséis
//if (EEPROM.readLong(508)!=4011983) { //En ese punto, preferiblemente al final, guardo un valor para saber si ya la he reseteado
// for(int i=0; i<500; i=i+4) { //Ajustar el valor según el tamaño de la (EEPROM)-8
// EEPROM.update(i,0);
// }
// EEPROM.update(508,4011983); //Almacenamos un número indicativo de que ya se ha inicializado en la última posición
// //Serial.println("Borrado de EEPROM terminado"); //sólo debería aparecer 1 vez
//}
//Definir pines
//You need not set pin mode for analogRead - though if you have set the pin to
//output and later want to read from it then you need to set pinMode(0,INPUT);
//where 0 is the physical pin number not the analog input number.
//pinMode(PIN, OUTPUT);
pinMode(relePIN,OUTPUT);
pinMode(ledPIN,OUTPUT);
pinMode(zumbPIN,OUTPUT);
//Pin para reactivar el motor (OPCIONAL) (tendríamos que conectarlo a tierra para activarlo)
pinMode(intPIN,INPUT);
digitalWrite(intPIN, HIGH); //Ponemos el pin en HIGH mediante su resistencia interna (pullup), evitando interferencias
digitalWrite(relePIN,HIGH); //Encendemos la bici al conectarlo
timeLED=millis();
millisUso=millis();
pixels.begin(); // This initializes the NeoPixel library.
//Encendemos los LEDs para indicar puesta en marcha y comprobar que los colores funcionan
//Eliminar esto si necesitamos más memoria para el programa
// pixels.Color convierte valores RGB, de 0,0,0 hasta 255,255,255; (verde, rojo, azul)
pixels.setPixelColor(0, pixels.Color(0,150,0)); //Encendemos rojo
pixels.show(); // Envía el color actualizado al hardware.
delay(200);
pixels.setPixelColor(0, pixels.Color(150,0,0));
pixels.show(); //Verde
delay(200);
pixels.setPixelColor(0, pixels.Color(0,0,150));
pixels.show(); //Azul
delay(200);
for(int x=0; x<1; x++) { //Hacemos parpadear todos dos veces
pixels.setPixelColor(0, pixels.Color(100,100,100)); //Blanco
pixels.show();
delay(300);
pixels.setPixelColor(0, pixels.Color(0,0,0)); //apagado
pixels.show();
delay(300);
}
//millisInicio=millis();
//Serial.begin(9600);
//Serial.println("Iniciamos programa");
}
void loop() {
//Recoge 6 muestras para sacar medias
Serial.println("Leemos valores");
for(int x=0; x<6; x++) {
//coge el voltaje en milivoltios, pasamos a voltios con la rutina doubleMap ahorrando memoria
voltaje[x] = doubleMap(double(readVcc()),0,6000,0,6); //Pasamos los valores de entre 0 a 6000 a valores entre 0 y 6V
delay(15); // espera entre lecturas
}
//Ordenamos para descartar bajo y alto
for(int x=0; x<6; x++) {
for(int y=0; y<6; y++) {
if (voltaje[y]<voltaje[y+1]) {
value=voltaje[y];
voltaje[y]=voltaje[y+1];
voltaje[y+1]=value;
}
}
}
//Sacar media y voltaje real
value=0;
for(int x=1; x<5; x++) {
value=value+voltaje[x];
}
value=(double)value/4;
value= int(value*100); //Trabajamos con sólo dos decimales (no merece la pena más exactitud)
value= value/100;
//DEBUG CALIBRACIÓN VOLTAJE Para saber décimas voltaje lee el Attiny y ajustarlo en el valor calibVolt
//El led rojo parpadeará tantas veces como valor (0,12 = 12 veces)
//Descomentar para calibrar; recomendado probar con voltaje bajo para contar poco ;)
//analogWrite(ledPIN, 0);
//delay(2000);
//value=value-int(value);
//value=int((value-int(value))*100); //le quitamos parte entera (3,09 -> 9 pulsos del led)
//for(int x=0; x<value; x++) {
// analogWrite(ledPIN, 100); //Rojo
// delay(200);
// analogWrite(ledPIN, 0);
// delay(600);
//}
//delay(2000);
//Aquí se evalúa el color del led según los valores del voltaje, para evitar que fluctúe se tiene en cuenta
//qué color tenía antes, y no cambia hasta que haya una variación mayor de 0,02V
if (value<=mVoltCarga[1] && value>.5) { //ROJO PARPADEANTE, SE DAÑA LA BATERÍA; RECARGAR LO ANTES POSIBLE
color=0;
if (parpadea==false) {
pixels.setPixelColor(0, pixels.Color(0,luminLED,0));
parpadea=true;
}
else { pixels.setPixelColor(0, pixels.Color(0,0,0)); //apagado
parpadea=false;
}
}
else if (value<=mVoltCarga[2] && value>mVoltCarga[1]) { //ROJO; Recargar lo antes posible
//Si el color no estaba establecido o era el mismo o ha variado suficientemente el voltaje
if (color==0 or color==1 or (color==2 and value<=mVoltCarga[2]-0.02)) {
color=1;
pixels.setPixelColor(0, pixels.Color(0,luminLED,0));
}
}
else if (value<=mVoltCarga[3] && value>mVoltCarga[2]) { //NARANJA; se parece más al rojo
if (color==0 or color==2 or (color==3 and value<=mVoltCarga[3]-0.02) or (color==1 and value>mVoltCarga[2]+0.02) ) {
color=2;
pixels.setPixelColor(0, pixels.Color(luminLED*0.3,luminLED*0.7,luminLED*0.1)); //Entre el 20 y el 30%; momento de recargar la batería
}
}
else if (value<=mVoltCarga[4] && value>mVoltCarga[3]) { //AMARILLO color 3
if (color==0 or color==3 or (color==4 and value<=mVoltCarga[4]-0.02) or (color==2 and value>mVoltCarga[3]+0.02) ) {
color=3;
pixels.setPixelColor(0, pixels.Color(luminLED*0.4,luminLED*0.5,0)); //Aconsejable recargar batería
}
}
else if (value<=mVoltCarga[5] && value>mVoltCarga[4]) {//VERDE color 4
if (color==0 or color==4 or (color==5 and value<=mVoltCarga[5]-0.02) or (color==3 and value>mVoltCarga[4]+0.02) ) {
color=4;
pixels.setPixelColor(0, pixels.Color(luminLED*0.5,0,0)); //Le bajo la intensidad todavía más; al fin y al cabo, siempre estará encendido
}
}
else if (value<=mVoltCarga[6] && value>mVoltCarga[5]) {//AZUL color 5
if (color==0 or color==5 or (color==6 and value<=mVoltCarga[6]-0.02) or (color==4 and value>mVoltCarga[5]+0.02) ) {
color=5;
pixels.setPixelColor(0, pixels.Color(0,0,luminLED)); //Se ha sobrecargado; recomendable no llegar al azul para maximizar vida útil
}
}
else { //>100% VIOLETA 6
color=6;
pixels.setPixelColor(0, pixels.Color(0,luminLED*0.6,luminLED*0.75)); //Por encima de lo recomendado; PELIGROSO
}
pixels.show(); //Actualizamos el color del led
//Comprobamos si millis se ha desbordado (tras 50 días)
if (millisUso>millis()) {
millisUso=millis();
}
if (millisVoltaje>millis()) {
millisVoltaje=millis();
}
//Si detectamos que la bici no se usa durante el tiempo indicado, apagamos todo, hasta que no se pulse en interruptor del P2 no vuelve a continuar
if ((millis()-millisUso)>=20000*long(minutos)) { //Al hacer tres comprobaciones dentro del tiempo marcado, dividimos entre tres los minutos
millisUso=millis();
if (parada==false) {
parada=true;
voltajeAnt=value; //Para redondear a 3 dígitos (sólo nos interesa comparar con dos decimales)
}
else {
parada=false;
if (value<=voltajeAnt-0.01 and value<=voltajeAnt+0.01) {
voltIgual=true;
millisVoltaje=millis();
}
}
}
if (voltIgual==true && (millis()-millisVoltaje)>=20000*long(minutos)) {
millisVoltaje=millis(); //reseteamos tiempo
voltIgual=false;
if (voltajeAnt==value) {
//En dos chequeos durante el tiempo no ha cambiado voltaje, por lo que dormimos la cpu
apagaTodo();
}
}
//Para protección de batería
//Si baja del 4,5% la batería, activamos zumbador hasta que sea del 1% o menor
if (value<=(mVoltCarga[0]+mVoltCarga[1])/2 && value>=mVoltCarga[0]) {
if (alarma==false) {
alarma=true;
digitalWrite(zumbPIN,HIGH);
}
else {
alarma=false;
digitalWrite(zumbPIN, LOW);
}
}
//si baja del valor de 1% hacemos sonar alarma brevemente y apagamos todo
if (value<=mVoltCarga[0]) {
digitalWrite(relePIN,LOW);
for(int x=1; x<20; x++) {
digitalWrite(zumbPIN,HIGH);
delay(100);
digitalWrite(zumbPIN, LOW); //Desactivamos alarma por si quedaba activada
delay(100);
}
apagaTodo();
}
//Utilizo la EEPROM para valores estadísticos únicamente; se puede eliminar si se considera
/* DATOS GUARDADOS EN EEPROM *PENDIENTE DE HACER
* 0: Horas funcionamiento Arduino
* 3: Último voltaje Arduino, para controlar el número de recargas
* 7: Contador de recargas de baterías
* 11: Contador de viajes/encendidos
* 15: Voltaje máximo histórico
* 19: Voltaje mínimo histórico
* 23:
* 27:
* 31:
*/
////Guardamos las horas de uso en la EEPROM (NO PUEDO USARLO, NO DA LA MEMORIA DEL ATTINY85)
//if ((millis()-millisInicio)>3600000) { //Ha pasado una hora
// millisInicio=millis();
// EEPROM.update(0,EEPROM.readLong(0)+1); //Añadimos una hora al contador
// }
////Comprobamos valor mínimo y actualizamos
//if (EEPROM.readLong(19)>value) {
// EEPROM.update(19,value);
//}
////Comprobamos valor máximo y actualizamos
//if (EEPROM.readLong(15)<value) {
// EEPROM.update(15,value);
//}
//Hacemos parpadear al LED comprobando el tiempo desde la última activación
if (timeLED>millis()) { //Cuando pasen 50 dias resetear
timeLED=millis();
}
if ((millis()-timeLED)>2000) {
analogWrite(ledPIN,100); //enciende LED brevemente indicando funcionamiento
timeLED=millis();
delay(50);
analogWrite(ledPIN,0);
}
//Para velocidad de respuesta; si se detecta activación manual del interruptor, ponemos a dormir la bici
//El resto del código se ejecutará 1,5 veces cada segundo aprox.
for(int x=1; x<20; x++) {
if (digitalRead(intPIN)==LOW) {
apagaTodo();
break;
}
delay(25);
}
}
void apagaTodo() {
//Prefiero conectar el interruptor entre el PIN y Tierra, con una resistencia que mantenga el pin en HIGH de 10K
//Ya que por ejemplo en el P3, hay una resistencia pull-up y la resistencia externa podría no ser suficiente para ponerlo en LOW
//pero si lo conectamos a Tierra, no habrá duda de que lo ponemos en LOW.
//Hay que tener en cuenta que sólo dormimos la cpu, pero todos los pines quedan con las salidas preestablecidas
digitalWrite(relePIN,LOW); //apagamos todo y ponemos al attiny a dormir
pixels.setPixelColor(0, pixels.Color(0,0,0)); //Apagamos LED, ya que es independiente; sigue gastando algo, pero menos
pixels.show(); //Actualizamos
delay(400); //Damos tiempo a soltar el interruptor
sleep(); //Dormimos
// Continuará aquí tras la interrupción al activar interruptor
digitalWrite(relePIN,HIGH);
}
void sleep() { //Válido para todos los Arduino en teoría
GIMSK |= _BV(PCIE); // Enable Pin Change Interrupts
PCMSK |= _BV(PCINT2); // Usar Pin entrada 2, que es P4
ADCSRA &= ~_BV(ADEN); // ADC off
set_sleep_mode(SLEEP_MODE_PWR_DOWN); // replaces above statement
sleep_enable(); // Sets the Sleep Enable bit in the MCUCR Register (SE BIT)
sei(); // Enable interrupts
sleep_cpu(); // sleep
// Continuará aquí tras la interrupción
cli(); // Disable interrupts
PCMSK &= ~_BV(PCINT2); // Turn off PB3 as interrupt pin
sleep_disable(); // Clear SE bit
ADCSRA |= _BV(ADEN); // ADC on
sei(); // Enable interrupts
} // sleep
ISR(PCINT0_vect) {
// Se llama a esta rutina cuando ocurre la interrupción; no la necesito utilizar
}
// *************** RUTINAS LECTURA VOLTAJE ***************
double doubleMap(double x, double in_min, double in_max, double out_min, double out_max)
{
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min;
}
long readVcc() {
// Read 1.1V reference against AVcc
// set the reference to Vcc and the measurement to the internal 1.1V reference
#if defined(__AVR_ATmega32U4__) || defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__)
ADMUX = _BV(REFS0) | _BV(MUX4) | _BV(MUX3) | _BV(MUX2) | _BV(MUX1);
#elif defined (__AVR_ATtiny24__) || defined(__AVR_ATtiny44__) || defined(__AVR_ATtiny84__)
ADMUX = _BV(MUX5) | _BV(MUX0);
#elif defined (__AVR_ATtiny25__) || defined(__AVR_ATtiny45__) || defined(__AVR_ATtiny85__)
ADMUX = _BV(MUX3) | _BV(MUX2);
#else
ADMUX = _BV(REFS0) | _BV(MUX3) | _BV(MUX2) | _BV(MUX1);
#endif
delay(2); // Wait for Vref to settle
ADCSRA |= _BV(ADSC); // Start conversion
while (bit_is_set(ADCSRA,ADSC)); // measuring
uint8_t low = ADCL; // must read ADCL first - it then locks ADCH
uint8_t high = ADCH; // unlocks both
long result = (high<<8) | low;
//la referencia interna puede variar entre 1,08 y 1,2V. He preferido hacer la calibración sobre el resultado en código
result = refIntVolt*1023*1000 / result; // Calculate Vcc (in mV); 1125300 = 1.1*1023*1000
return result; // Vcc in millivolts
}
Se usaba parte del código de la referencia de Digispark para obtener el voltaje en el mismo pin de alimentación (con al referencia interna de 1,1V).
Como habéis visto, al final me he decantado por un Nano, que monta un Atmel 328 y es compacto; tenemos 30 Ks de memoria flash disponibles y 2 Ks de SRAM, y suficientes entradas y salidas para hacer muchas cosas :).
Con estas mejoras la bici ya tiene todo lo que quería que tenga (por ahora jj), ¡ahora a disfrutar diariamente con ella! (Y espero no tener que volver a tocar sus tripas en una larga temporada, bufff 😉
PD: Gracias cariño por tu paciencia!
Fuente original: Tecnología para un progreso sostenible